Úvod
Poslední eval. boardy společnosti Xilinx (ML605 a SP605), určené pro FPGA Virtex- 6 a Spartan-6, využívají napájecí schéma s digitálním regulátorem Texas Instruments [1].
Vývojáři, přicházející do styku s FPGA či procesory, musí často a s vysokou mírou účinnosti zajistit relativně velké množství energie pro připojenou zátěž. Zároveň přitom nestačí jen bezchybně regulovat zapracované úrovně napájení, resp. nadměrně nepřehřívat čip, ale možná také dostaneme požadavky na přídavné funkce, jak ostatně podrobně popíšeme v následujícím textu.
Přestože máme k dispozici bezpočet možností, jak realizovat zdroje v duchu POL (point-of-load), proč inženýři vyžadují právě jejich číslicovou alternativu? Pojďme na to tedy najít společnou odpověď.
Napájecí schéma digitálního řešení POL
Na obr. 1 vidíme integrované provedení multiúrovňového číslicového regulátoru UCD9246, který jsme připojili hned k několika výkonovým stupňům. Kontrolér řídí výstupní napětí, přičemž využívá vzorkování příslušných napětí/proudů, zapracovaných smyček číslicového řízení a také PWM signálů s vysokým rozlišením pro výkonové stupně. Výkonový stupeň se přitom skládá z FETů a jejich budičů, indukčnosti a kondenzátorů. Nechybí zde ani proudové, napěťové či teplotní zpětnovazební signály pro regulátor.
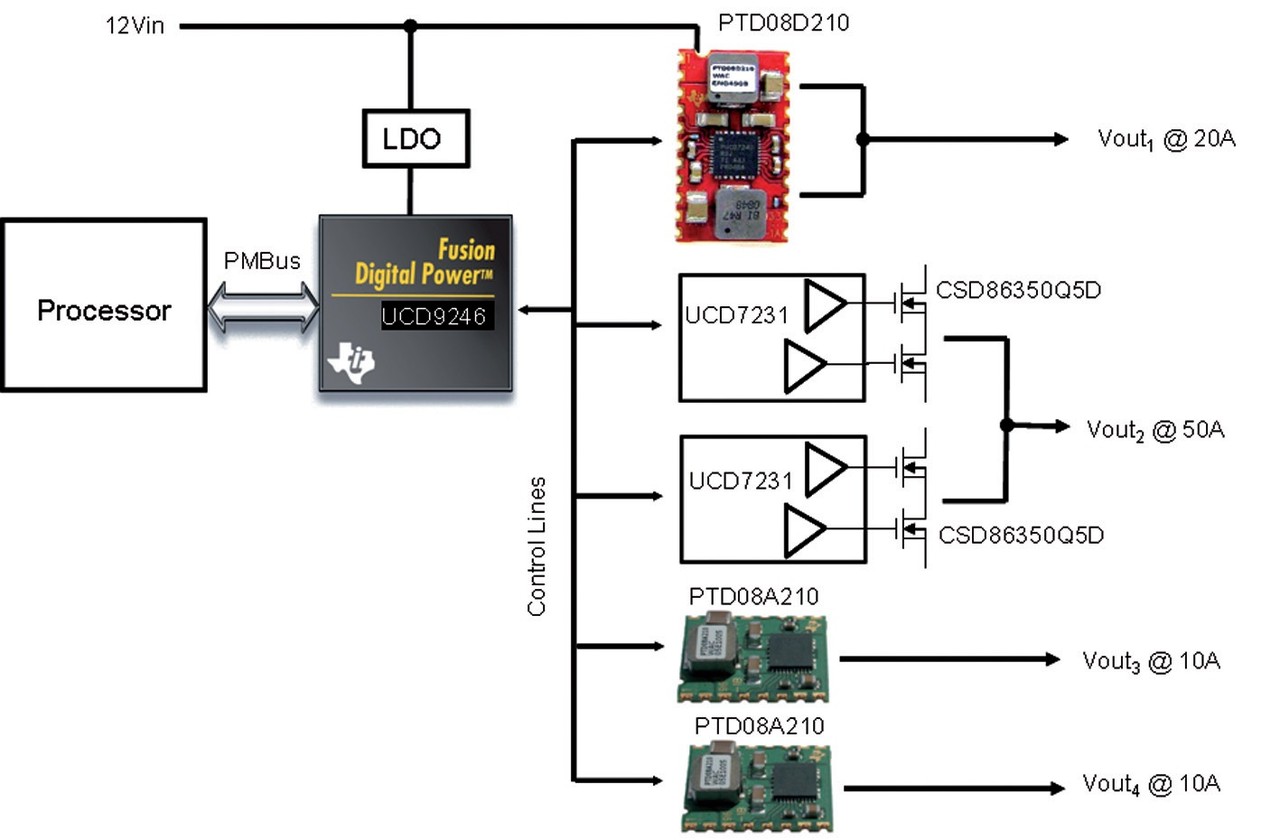
Obr. 1 Napájecí schéma digitálního řešení POL
Výkonový stupeň
Nejjednodušší způsob implementace výkonového stupně spočívá v kompaktním provedení (15×28 mm) digitálního napájecího modulu, jako třeba PTD08D210. Jeho dva výstupy lze konfigurovat jako 2×10 A, resp. spojit je a vytvořit tak 1×20 A. Další možností návrhu výkonového stupně je digitální budič FET – UCD7232 (již brzy, obdoba s UCD7231) a k tomu MOSFETy „NexFET“ s velmi vysokou účinností od Texas Instruments, například duální CSD86350Q5D či CSD86330Q3D.
Mezi důvody, proč vyrábět napěťové úrovně prostřednictvím diskrétních integrovaných obvodů, řadíme následující: (1) Lze konvertovat z nižšího vstupního napětí, již od 2,2 Vin; (2) Můžeme zvolit vlastní indukčnost a minimalizovat tak např. její výšku; (3) Můžeme navrhnout řešení, které bude odpovídat konkrétnímu výstupnímu proudu.
GUI Fusion
GUI Fusion Digital Power Designer™ je výkonným, volně stažitelným softwarovým nástrojem TI, určeným ke konfiguraci všech oblastí daného regulátoru. Jako příklad uvádíme na obr. 2 konfigurační okno Vout. Grafické znázornění posloupností zde jednoduše ukazuje, jaké výsledky vnesou údaje, zadávané pro jednotlivé parametry.
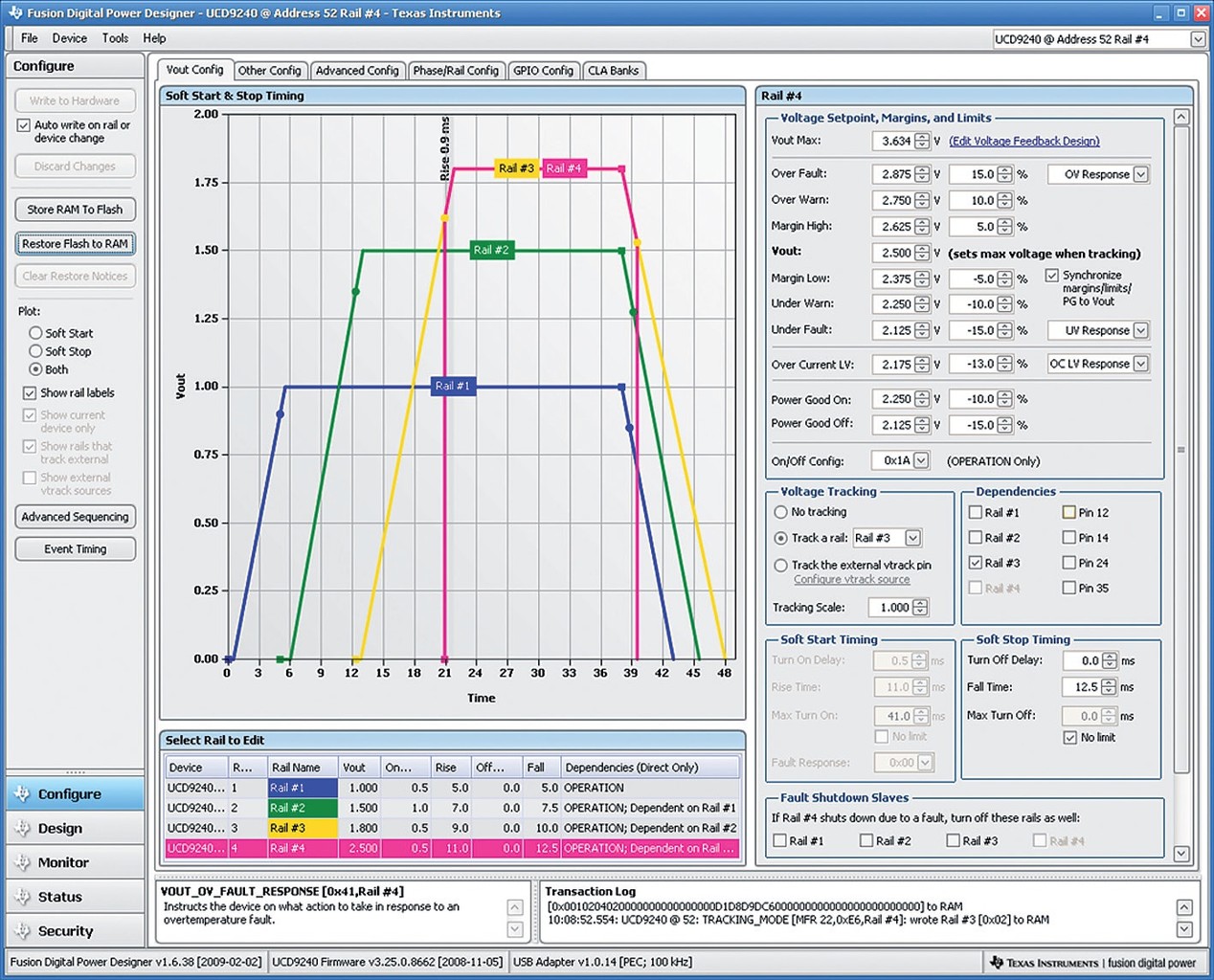
Obr. 2 Konfigurační okno Vout v rámci GUI Fusion
Vývojová deska
Vývojový board pro aplikace s UCD9246, zachycený na obr. 3, dokazuje, jak rychle mohou vývojáři realizovat a následně rozběhnout výrobu vícenásobných výstupů s vysokou proudovou zatížitelností. Propojení s počítačem umožňuje konfiguraci z GUI Fusion.
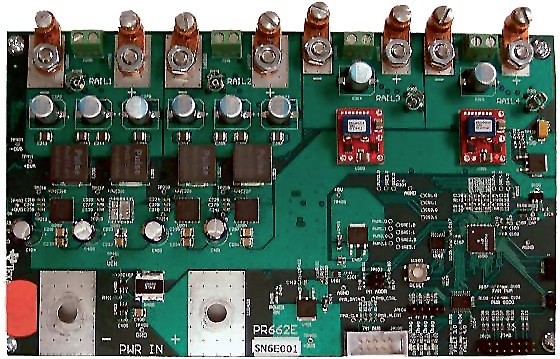
Obr. 3 Vývojová deska pro aplikace s UCD9246
Devět vlastností digitálního řešení POL
Vývojáři nakonec z možných řešení volí jedno konkrétní, to, které bude přínosné z hlediska ceny a ne proto, že by bylo nové či „digitální“. V následující části tedy prozkoumáme přínos číslicového řešení napájení s UCD92xx a také vysvětlíme návaznost na GUI Fusion.
- Řízení posloupnosti napájení. S požadavkem, aby byly určité napěťové hladiny k dispozici dříve než ostatní, zejména pak v případě napájení FPGA či procesoru, se setkáváme docela často. Prostor pro takové řízení zde může být dokonce i v případě, že zmíněná funkce nebude vyžadována – zajistíme tím totiž určitou opakovatelnost výsledků v okamžiku, kdy náš návrh půjde do sériové výroby. Další dobrý důvod pro řízení posloupnosti napájení spočívá v omezení nárazových proudových odběrů.
GUI Fusion umožní rychlé nastavení každého napěťového výstupu v závislosti na dalších – můžeme zde definovat aktivaci nebo také deaktivaci napěťové hladiny poté, co jiná dosáhne ustáleného stavu, příp. se dostane mimo mez regulace.
Využijeme-li programovatelného zpoždění a také možností v souvislosti s dobou náběhu regulátorů UCD92xx, můžeme načasovat spouštění většího počtu napěťových hladin. Obvody UCD92xx lze rovněž konfigurovat tak, aby umožnily sekvenční spouštění nebo deaktivaci výstupních napětí, resp. poměrový náběh, kde dvě hladiny dosáhnou regulace ve stejném čase. Také zde podporujeme sledování náběhu, viz spouštění s předpětím, bod č. 8 níže. - Monitorování a záznam událostí do non-volatilní paměti. Regulátory UCD92xx umožňují nastavení čtyř úrovní pro danou hladinu – podpěťovou/přepěťovou výstrahu a chybové podpětí/přepětí. Kontrolér se pak může zachovat určitým definovaným způsobem – deaktivuje třeba jiný výstup (výstupy) nebo provede automatický restart, dostane-li se dané napětí mimo uživatelsky definovanou oblast regulace.
Nechybí zde ani výkonovým stupněm monitorovaný proud dané fáze včetně zpětného hlášení, obdobně pak také vstupní napětí a teplota výkonového stupně, je-li tedy použit digitální modul. Nadproudy/ podproudy, přepětí/podpětí a také upozornění na limitní překročení teploty, příp. prahové úrovně pro vyhlášení chyby – to vše lze uživatelsky nastavit. - Omezení počtu součástek. Zapracování digitálního řešení napájení podporuje víceúrovňové, multifázové napájecí zdroje, řízené jedním integrovaným obvodem. Jelikož je dále časování konfigurováno číslicově, nemáme zde žádné související kondenzátory nebo rezistory. Kompenzační smyčky se nachází v číslicové oblasti, takže zde nehledejme žádné vnější pasivní součástky, kterými by docházelo k nastavení nul a pólů. Tentýž integrovaný obvod zároveň zajišťuje další funkce, např. ve věci monitorování či řízení posloupnosti.
- Číslicová změna Vout včetně regulace v daném tolerančním pásmu. V digitálně řešeném přístupu k napájení je výstupní napětí Vout pro každou z dostupných hladin předmětem číslicového řízení, tzn. že host procesor může v součinnosti s digitálním kontrolérem zapsat prostřednictvím rozhraní PMBus novou hodnotu Vout konkrétního napěťového výstupu. Některé kontroléry rodiny obvodů UCD92xx, např. UCD9222 a UCD9224, rovněž nabídnou multibitové rozhraní VID (Voltage Identification), umožňující dynamické přizpůsobení napětí, dodávaného pro danou část.
Při testování odolnosti celého systémového návrhu rozumíme pod označením margining schopnost změny Vout směrem nahoru nebo také dolů o předem stanovenou velikost, přičemž zde vycházíme z požadované tolerance každé z napěťových hladin a také plné podpory ze strany regulátoru. - Spojování výstupů s ohledem na vyšší proudové odběry a možnost odlehčení fáze v případě méně intenzivního zatížení. Paralelní řazení většího počtu obvodů, složených z polovičního MOSFETového můstku spolu s indukčností, se často jeví jako žádoucí. Uvažujeme- li plné zatížení, kterému dominují ztráty na vedení, bude účinnost multifázového měniče vyšší než v případě jednofázového řešení. Další výhoda nasazení většího počtu fází pak spočívá v navýšení povrchové plochy výkonové konverze, což nahrává lepším tepelným poměrům a také provedení s nižším profilem. Dochází-li k prokládání spínacích kroků jednotlivých fází, skutečný spínací kmitočet poroste, takže můžeme dosáhnout menšího napěťového zvlnění vstupu i výstupu a také nižšího počtu kondenzátorů.
V případě malého zatížení, kterému zase dominují spínací ztráty, pak lze regulátor UCD92xx nakonfigurovat tak, aby automaticky odpojil nepotřebné výkonové stupně. Hovoříme o odlehčení fáze, resp. navýšení účinnosti při malém zatížení. - Nakonfigurujte si svou vlastní kompenzaci řídicí smyčky, příp. využijte Autotune. Autotune je významnou částí GUI Fusion pro návrh kompenzace modulárního či uživatelsky definovaného výkonového stupně (póly/nuly). Můžeme přitom využít nelineárního řízení. Jako příklad zde uveďme omezení zisku v případě ustáleného stavu s ohledem na minimalizaci rušení – jitteru na výstupu; jestliže však chyba překročí určitou mez, aktivujeme vyšší zesílení a přivádíme tak výstup měniče zpět na jeho požadovanou hodnotu mnohem rychleji. V praxi to pak znamená, že dochází k minimalizaci rušení Vout z titulu přechodových jevů na zátěži.
Další významnou vlastností obvodu UCD9246 je Auto-ID, zavádějící do řídicí smyčky sinusový průběh a měřící odezvu systému v dalším bodě smyčky. UCD9246 tak může změřit své vlastní přenosové funkce v uzavřené smyčce. - Synchronizace spínacího kmitočtu. V některých aplikacích je žádoucí synchronizovat spínací kmitočty napříč jedním nebo také více kontroléry s využitím společného hodinového vstupu, což zde samozřejmě podporujeme.
- Spouštění s předpětím. „Předpětím“ zde rozumíme již existující napětí na nepovoleném výstupu (např. napětí pro jádro), přičemž za jeho parazitním vznikem – nabitím stál jiný napěťový zdroj. Pokud se s takovým stavem vhodně nesrovnáme, může po uvolnění napětí pro jádro synchronním MOSFETem protéct velký proud, který jej zničí.
Abychom tomu zabránili, implementujeme v kontroléru spouštěcí funkci uzavřené smyčky, přičemž jako příslušný vstup využíváme předpětí na Vout. Dojde-li pak ve výsledku k povolení, bude napětí stoupat hladce a monotónně. - Podporujeme změny na poslední chvíli, tzv. „last minute“, včetně nových zákaznických požadavků, a to bez jinak nezbytných hardwarových změn. Někdy se do specifikace na poslední chvíli dostanou další požadavky nebo změny. Vzhledem k tomu, že větší část napájení spadá pod řízení (firmware), budou zde i větší šance na to, že takové dodatečné úpravy zapracujeme beze změn na desce plošného spoje.
Závěr
Číslicově řízené zdroje v duchu POL nachází své pravé místo v aplikacích, ve kterých oceníme jejich silné stránky.


 Vítejte, dnes je
čtvrtek
03.
duben
2025
Vítejte, dnes je
čtvrtek
03.
duben
2025














