
 Vítejte, dnes je
středa
01.
červenec
2026
Vítejte, dnes je
středa
01.
červenec
2026

Verifikace pomocí assertions: případové studie
Úvod
Předchozí články [1,2] po řadě představily jak základní koncepci, výhody a nevýhody assertions, tak základy jazyka PSL. K získání úplného obrazu však čtenáři stále mohou chybět případové studie – ukázky používání assertions v reálných návrzích. Ty jsou užitečné pro získání lepší představy o tom, kde všude mohou assertions pomoci, a navíc mohou sloužit i jako inspirace pro vlastní práci. Případovým studiím je proto věnován tento příspěvek.
V následujícím textu jsou prezentovány různé modelové situace, se kterými se lze setkat v běžném životě. Předkládané příklady jsou vybrány z praxe autora článku; jsou to situace, ve kterých se použití assertions osvědčilo a současně je možné jejich použití vysvětlit v omezeném prostoru tohoto příspěvku. U jednotlivých případů je kód assertion uveden přesně tak, jak je zapsán v příslušném návrhu číslicového systému; jsou také uvedeny další potřebné detaily k pochopení příkladu. Některé z demonstračních příkladů také úmyslně užívají vlastnosti PSL jazyka, které v článku [2] nebyly vysvětleny, aby byl čtenář upozorněn na další možnosti PSL a získal materiál pro další studium.
Hardwarový zásobník návratové adresy
V návrhu procesoru je použit blok hardwarového zásobníku pro návratovou adresu. Jedná se o jednoduchý procesor, zásobník je omezen na čtyři úrovně vnoření a návratová adresa se ukládá do registrů implementovaných přímo v zásobníku(pro implementaci zásobníku tedy není použita operační paměť). Rozhraní bloku a základní struktura jsou rozkresleny na obrázku 1. Blok má asynchronní resetovací vstup mcu_res aktivní v log. 1 (ten je vhodné použít pro blokování kontroly assertions), pracuje s náběžnou hranou hodin mcu_clk a současná hodnota čítače instrukcí je do něj přivedena po sběrnici mcu_pc. Zásobník – hlavní struktura v bloku – je implementován pomocí čtyř šestnáctibitových registrů reg0 – reg3. Operace prováděná nad zásobníkem je definována hodnotou na vstupní sběrnici mcu_pc_cmd realizované výčtovým typem. Na sběrnici se mohou objevit hodnoty PC_CALL (operace CALL, na zásobník je uložen aktuální stav čítače programu), PC_RET (operace RETURN, ze zásobníku je vyčtena poslední uložená návratová adresa) a PC_RES (operace RESET, obsah zásobníku je zinicializován).
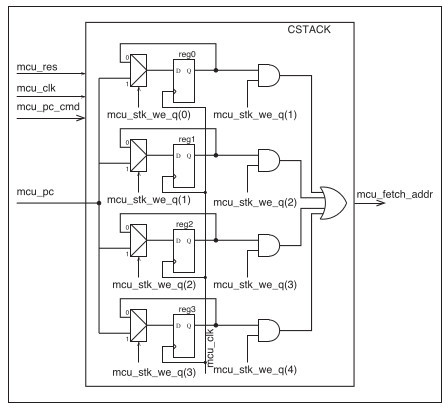
Obr. 1 Ideové schéma návrhu zásobníku návratové adresy
Všimněte si, že (sledujte také obr. 1):
- Zápis a čtení hodnot ze zásobníku vyvolané jako součást provádění operace CALL jsou řízeny pomocí sběrnice mcu_stk_we_q. Hodnota na této sběrnici je vždy kódována v kódu 1 z N, bit v log. 1 definuje, do kterého registru se bude zapisovat a z kterého číst. Když je například mcu_stk_we_q = = “00100”, je připraven k zápisu třetí registr zásobníku a je čtena hodnota z druhého registru.
- Operace CALL vede na posuv hodnoty na sběrnici mcu_stk_we_q o bit vlevo (vložení hodnoty do zásobníku), operace RETURN o bit vpravo (vyčtení hodnoty ze zásobníku).
Kontrolovat zde během simulace můžeme pomocí assertions následující:
- Kódování sběrnice mcu_ _stk_we_q s hodnotou selektoru musí být v kódu 1 z N, jinak se na výstupu bloku objeví špatný výsledek, protože by se prostřednictvím OR hradla zkombinovalo více výstupů z registrů (kontrola vnitřní integrity bloku; assertion se v kódu v rámečku A jmenuje asrt_stk_ _1ofn).
- Nikdy nesmí být vykonána instrukce CALL (mcu_pc_cmd = PC_CALL), pokud je zásobník zcela zaplněn (kontrola správného použití bloku a vnitřní konzistence aplikace běžící na procesoru; asrt_stk_full). To, že je zásobník zcela zaplněn, poznáme podle toho, že signál mcu_stk_we_q(4) je v log. 1.
- Nikdy nesmí být vykonána instrukce RET ( mcu_pc_cmd = PC_RET), pokud je zásobník prázdný (kontrola správného použití bloku a vnitřní konzistence aplikace běžící na procesoru; asrt_stk_empty). To, že je zásobník zcela prázdný, poznáme podle toho, že signál mcu_stk_we_q(0) je v log. 1.
Jak budou vypadat assertions v jazyce PSL, je uvedeno v rámečku A.

Čítač programu
V návrhu RISC procesoru pro embedded aplikace je dedikovaný blok realizující čítač programu. Celý blok je opět synchronní s náběžnou hranou hodin mcu_ _clk a asynchronně resetovaný signálem mcu_res v log. 1. Hodnota čítače programu je přenášená po sběrnici mcu_pc_q, celý blok čítače programu je synchronní s náběžnou hranou hodin mcu_clk. Čítač programu je generický blok a vlastní šířka čítače i sběrnice, která nese adresu zpracovávané instrukce, je konfigurovatelná pomocí generického parametru pc_wdt.
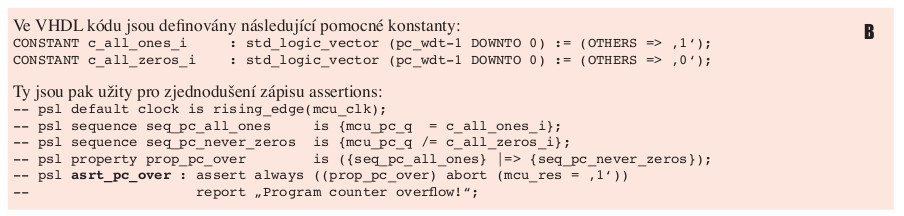
Z vlastností navrhovaného systému je zřejmé, že čítač programu nesmí nikdy přetéci, tj. přejít z hodnoty FFFFh na hodnotu 0000h. Taková situace by znamenala, že bude opět spuštěna část firmware určená pro inicializaci systému po studeném startu uložená do adresy 0000h v době, kdy procesor není resetován. Jednalo by se tedy patrně o důsledek chyby aplikace. Assertion je v ukázce kódu pojmenován asrt_pc_over. Všimněte si také použití konstrukce abort (mcu_ _res='1'), která blokuje výpis chybového hlášení v případě, že dojde k resetu bloku právě, když má čítač programu hodnotu FFFFh; pak je totiž přechod do stavu 0000h důsledkem správné funkce obvodu.
Jak bude vypadat assertion v jazyce PSL, je uvedeno v rámečku B.
Řízení DA převodníku
Blok DA převodníku v analogově-číslicovém systému má specifické požadavky na řídicí signály, k jeho řízení je v návrhu určený blok řadiče DA převodníku DACcontrol, viz obrázek 2. Celý blok řadiče je synchronní k náběžné hraně systémových hodin sys_clk a asynchronně resetovaný signálem sys_res_n aktivní v log. 0. Sestupná hrana signálu sys_dac_follow zapisuje do vstupního registru DA převodníku slovo ke konverzi na analogovou napěťovou úroveň. Implementace DA převodníku vyžaduje, aby vstupní slovo bylo stabilní alespoň tři hodinové cykly před sestupnou hranou signálu sys_dac_follow vzorkovanou náběžnou hranou systémových hodin. Konečně blok generuje synchronizační pulz pro navazující systém, který zpracovává analogový výstup DA převodníku. Synchronizační pulz má být vždy široký jeden hodinový cyklus.
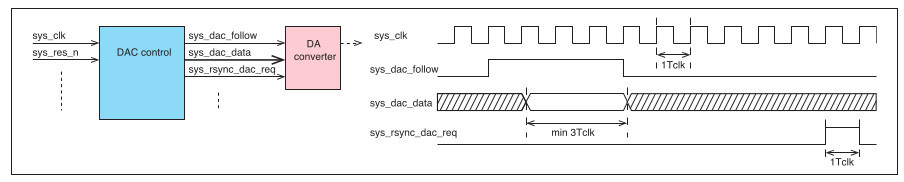
Obr. 2 Blok řízení DA převodníku
Kontrolovat pomocí assertions můžeme:
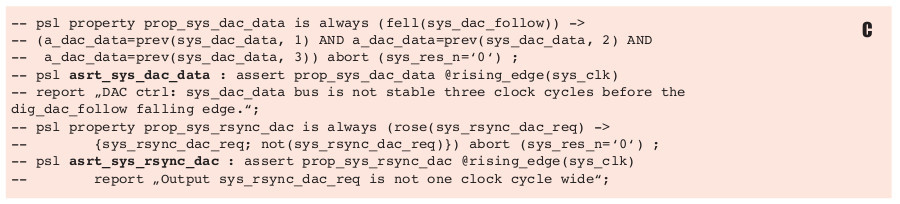
- Stabilitu datového signálu před sestupnou hranou sys_dac_follow (kontrola správné implementace řadiče DA převodníku, assertion asrt_sys_dac_ _data).
- Šířku synchronizačních pulzů na výstupu bloku – pulz smí být široký právě jeden hodinový cyklus (kontrola správné implementace řadiče DA převodníku, assertion asrt_sys_rsync_dac). Příklady implementace assertions jsou v rámečku C.
Řízení děličky
Mikropočítačový systém používá pro urychlení operace dělení blok hardwarové děličky, rozhraní bloku a základní komunikační protokol na rozhraní děličky, viz obrázek 3. Blok děličky je synchronní s náběžnou hranou na hodinách sys_clk a je také asynchronně resetován signálem sys_res v log. 1. Dělenec a dělitel jsou do registrů dělence a dělitele děličky nahrány tehdy, když je vstupní signál sys_wr_ _op v log. 1 (časový okamžik 1). Během vlastního dělení jsou tyto registry použity pro realizaci funkce dělení a jejich obsah se v průběhu dělení mění; nelze je tedy přepsat, pokud dělička běží, aby nedošlo k porušení její správné funkce. Rozhraní děličky pracuje v korespondenčním režimu; dělení je spouštěno signálem sys_start (okamžik 2) a dokončení operace dělení indikuje náběžná hrana signálu sys_ready (okamžik 3). Pro snazší implementaci bloku se počítá s tím, že během výpočtu dělení se mohou jak výstupní sběrnice sys_quotient, tak příznaky přetečení a dělení nulou libovolně měnit (šrafovaná oblast v obrázku 3); nicméně po ukončení výpočtu (po náběžné hraně signálu sys_ _ready) už řadič mikropočítače předpokládá, že se výstupy bloku nemění a jsou stabilní. Dělení je spuštěno mikroprogramem nadřazeného řadiče mikropočítače.
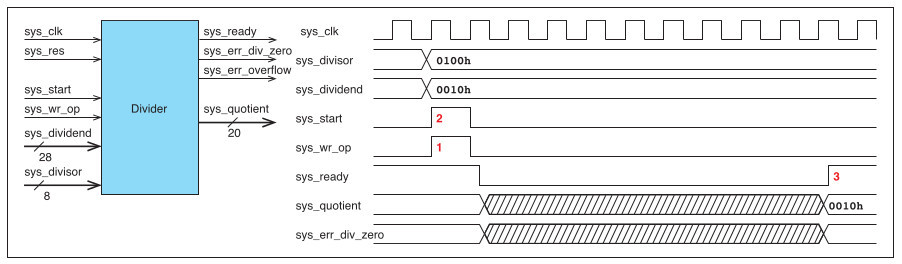
Obr. 3 Blok děličky a posloupnosti signálů na jejím rozhraní
Do bloku děličky tak můžeme přidat například tyto assertions:
- Indikace dělení nulou – signál sys_ _err_div_zero – nesmí měnit svoji hodnotu, pokud neprobíhá dělení (kontrola správné implementace děličky – pokud neprobíhá dělení, nesmí se nic dít; assertion asrt_stable_sys_err_div_ _zero).
- Řadič mikropočítače nesmí číst výstupní registr děličky, dokud není dokončeno dělení (kontrola správné implementace mikroprogramu nadřazeného mikropočítače – tedy integrace děličky, assertion asrt_early_div_lo). K děličce mikroprogram přistupuje instrukcemi pro čtení a zápis z/do registrů; například čtení výstupu dělení lze identifikovat tak, že je na adresní sběrnici mcu_rd_addr přítomna adresa uložená v konstantě divquotient. ––Řadič mikropočítače se nesmí pokusit odstartovat dělení, pokud dělení právě probíhá (kontrola správné implementace mikroprogramu nadřazeného mikropočítače – tedy integrace děličky – a současně kontrola toho, že dělení „jednou skončí“, protože nekonečná operace dělení vyvolá při příštím spuštění bloku chybu; assertion asrt_div_start).
- Řadič mikropočítače nesmí přepsat registry dělence a dělitele, pokud probíhá dělení (opět kontrola správné implementace mikroprogramu – integrace děličky; assertion asrt_div_wr).
- V rámci verifikace celého systému je třeba provést i ověření správné funkce děličky v mezních stavech. Verifikátor bloku tedy bude chtít vědět, zda během simulací došlo k tomu, že bylo vyvoláno dělení nulou (coverage assertion je pojmenován cov_err_zero) a že došlo k přetečení (cov_err_over). Konečně je vhodné i vědět, kolikrát bylo dělení v rámci verifikace obvodu vůbec spuštěno (assertion cov_start). Všimněte si zde použití vlastnosti seq_detect_ _nonzero s parametrem, obdoby volání funkce v běžných programovacích jazycích.
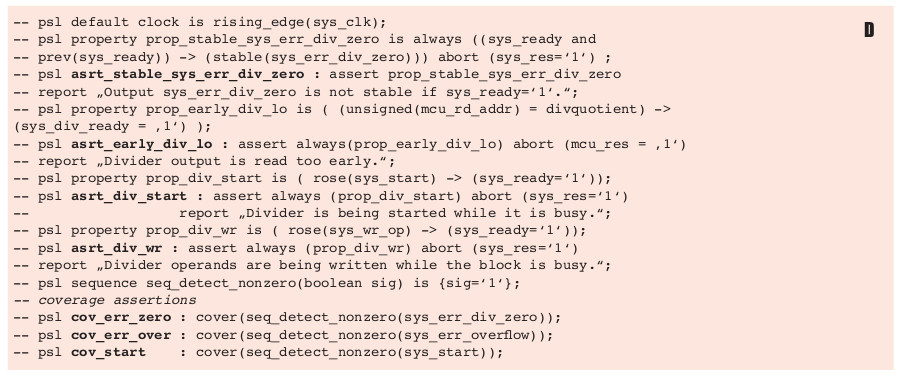
Jak budou assertions vypadat v jazyce PSL, je uvedeno v rámečku D.
Závěr
V textu článku byly prezentovány některé příklady použití assertions v návrhářské praxi. Ty mohou sloužit jednak jako inspirace, jednak po úpravě mohou být použity pro řešení podobných situací ve vlastních návrzích. Seriál o praktické aplikaci a použití assertions bude zakončen příštím příspěvkem, který bude věnován detailům metodologie použití assertions a několika radám, jak s verifikací pomocí assertions začít i bez potřeby simulátoru s podporou jazyka PSL.
Literatura
[1] Jakub Šťastný. Verifikace pomocí assertions: seznámení. DPS Elektronika od A do Z, číslo 6, pp. 4–8, 2012.
[2] Jakub Šťastný. Verifikace pomocí assertions: jazyk PSL. DPS Elektronika od A do Z, číslo 2, pp. 30–34, 2013.
[3] Harry Foster, Adam Kolnik, David Lacey. Assertion Based Design, 2nd edition. 2004 Kluwer Academic Publisher.
