

 Vítejte, dnes je
čtvrtek
03.
duben
2025
Vítejte, dnes je
čtvrtek
03.
duben
2025
Tento článek navazuje na příspěvky uvedené v předchozích číslech časopisu DPS. Popisuje problémy spojené s použitím RFID čteček a tagů v darwinistickém prostředí automotivních aplikací a způsob jejich vyřešení vývojovým týmem Ryston Electronics.

Zákazník zpočátku požadoval poněkud vágně čtení nádob dvojicí čtecích zařízení, umístěných u vyklápěče na nákladním automobilu, na vzdálenost cca 2 m. Kromě toho byla formulována řada doplňujících požadavků:
V průběhu vývoje aplikace byly přidány další požadavky, které se z větší části podařilo splnit:
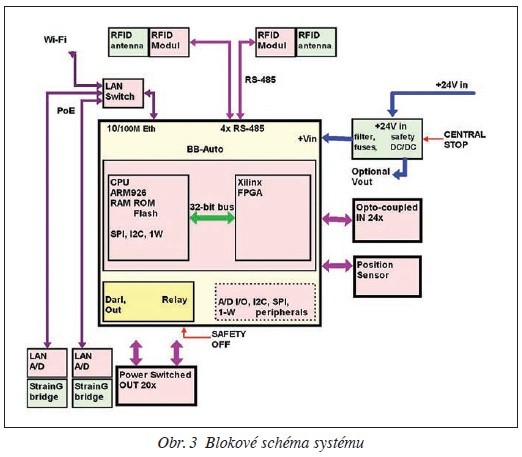
Pro realizaci byl použit osvědčený systém vestavného počítače z našeho vývoje, realizovaný modulem Combi s procesorem ARM a obvodem FPGA, a základní deskou BaseBoard pro automotivní aplikace. Oba tyto prvky zde byly již popsány. Systém pracuje pod operačním systémem reálného času (RT Linux).

Brzy jsme zjistili, že běžně dostupné čtečky RFID v pásmu 125 kHz mají velmi malý dosah, řádově centimetry, zatímco byl požadován spolehlivý dosah alespoň 1 m. Autonomní čtečky se navzájem rušily. Krom toho byly problémy s napájením a s přenosem po sériové lince RS232, náchylné k rušení. Hlavním problémem však byla požadovaná odolnost vůči vibracím (jedoucí nákladní auto, hydraulika) a venkovnímu prostředí, zostřenému všudypřítomnou mastnou špínou a vodou z tlakových myček. A v neposlední řadě ještě lidský faktor.
Ani čtečky pracující v pásmu 13 MHz nepřinesly potřebný výsledek, hlavně kvůli nedostatečnému mechanickému krytí.
Proto jsme vyvinuli vlastní čtečku s modulem založeném na obvodu PR9200, izolovaném DC-DC převodníku pro napájení, a datovým přenosem rozhraním RS-485 se symetrickým vedením. Čtečka pracuje ve volné části pásma UHF dle normy ISO18000-6, a to v evropské nebo globální verzi 868-925 MHz, dosažené díky programovatelnosti základního obvodu. Podstatným rysem čtečky jsou poměrně malé rozměry a vhodná směrovost díky keramické čtvercové anténě a relativní odolnost vůči povětrnosti.
Dále jsme zjistili, že problém vzájemného rušení čteček musí být eliminován zcela novým ovládacím programem (než jaký je k dispozici od výrobce jako demo), s komunikací (předávání povelů a vracení výsledků) řízenou nikoli čtečkou, ale centrálním počítačem, v určitém „rytmu“. Vylepšené softwarové ovládání umožnilo rozlišení síly signálu od různých tagů statistickou metodou, a tím bylo dosaženo selektivity čtení „správného“ tagu od těch na pozadí.
Centrální počítač však má na starosti ještě další děje: čidla pohybu, která vymezují oblast jakž takž rovnoměrného pohybu nádoby ve vzduchu před výsypem a po něm, stejně jako komunikaci se dvěma vážicími subsystémy, které pro velký objem dat používají rozhraní Ethernet 100 Mbps, a datové připojení k internetu po rádiu se zabezpečením dat.
Výsledný program je poměrně složitý balík využívající real-time mechanizmů operačního systému, s řadou synchronizovaných procesů a složitých systémových funkcí na úrovni práce se soubory a datovými proudy. Vše je doplněno, či spíše zkomplikováno, mnoha diagnostickými funkcemi, protože systém musí pracovat nejen v přítomnosti signálu GSM/GPS, ale i bez něj. Zpětně si uvědomuji, že „levné“ řešení pomocí nějakého jednočipového mikrořadiče prostě nemělo šanci na úspěch a použití vestavného počítače a RT operačního systému, které se ze začátku zdálo „přemotorované“, bylo velmi prozíravé. Systém nyní umí takové funkce jako přenos a matematickou analýzu „balíků dat“ z vážení, dálkovou aktualizací softwaru a on-line diagnostiku.
Dále se ukázalo, že pro různé nádoby a jejich materiál jsou potřeba i různé typy tagů. Normální respondér – tag – je ve formě například nálepky nebo karty, a může být umístěn na nádobě tam, kde je mechanicky krytý. Na běžné plastové nádobě či kontejneru může být upevněn v její spodní části, kryté kolečky, takže při vysypávání je vystaven anténě čtecího zařízení.
Jelikož kovová nádoba se chová jako elektromagnetické zrcadlo, je tag umístěný přímo na jejím povrchu v elektromagnetickém „stínu“ a je nutno použít tag s pohltivou vrstvou, umístěný v distančním krytu. Tento „anti-metal tag“ už má podobu ne nálepky, ale krabičky, která se musí upevnit na povrch nádoby nejlépe přinýtováním nebo jinou trvanlivou metodou. Je také o něco dražší.
Vážení vysypávaného odpadu si žádá zvážení plné a pak prázdné nádoby, s přidáním několika čidel polohy, u kontejnerů se hmotnosti změřené oběma stranami zvedáku musejí přepočítat. Systém je nutno kalibrovat a do centrální jednotky je třeba naprogramovat aplikaci pro vážení „za letu“ – v pohybu, aby se vážením provoz nezpomaloval. To bylo vyřešeno použitím G-senzoru (čidla zrychlení ve 3 osách) a senzoru polohy.
Spojením uvedených prvků tak vznikl inteligentní automotivní systém s možností rozšiřování na téměř neomezený počet portů, s vestavěným výkonným mikropočítačem schopným zpracovávat a ukládat data, s možností propojení do mobilní sítě LAN, GSM/GPRS, GPS a interními porty USB pro nastavování a záložní záznam na Flash disk.
Přestože vývoji softwaru a jeho simulaci bylo věnováno značné úsilí, po instalaci na automobilu přišla skutečnost reálného prostředí se všemi myslitelnými vlivy: sluneční záření degradující plasty, slaná mlha způsobující korozi, mastná špína, která vše pokrývá a vytváří elektromagneticky podivnou vrstvu, výkyvy napájení a přepěťové impulzy „load dump“ kvůli provozu řady spotřebičů na autě. Jako největší problém se ale ukázal lidský faktor, nárazy do zdí, mostů a větví stromů při jízdě, ale i singulární stavy USB paměti s velkým souborem při nečekaném vypnutí nebo zabloudění softwaru, anebo propojení několika systémů po sběrnici CAN. Výsledkem zkušebního provozu je nyní relativně spolehlivý systém, s přijatelně krátkými servisními intervaly. Přesto však vzhledem k plastovým krytům (a ne pancéřovým) se čas od času něco ulomí, takže neustálé opravy a servis není dobré podceňovat.
Modulární systém je výhodný pro nabízení různým provozovatelům svozu podle jejich potřeb, a také se rýsují nové možnosti.
Jelikož vyklápěcí mechanizmus je dělený (buď nezávislý vyklápěč pro dvě nádoby, anebo spojený hydraulicky ovládaným čepem pro kontejner), je v těchto módech také nutno správně ovládat hydraulické mechanizmy. Ukazuje se, že elektronické řízení začíná být výhodnější, i když je nutno implementovat zabezpečovací obvody, tlačítko Centrál-STOP atd.
Systém bylo podle očekávání nutno adaptovat pro několik typů vozidel, ale zároveň s tím se ukázaly nové možnosti, jako jsou myčky kontejnerů, čistě elektronické řízení místo hydraulického ovládání a vyhovění současným i budoucím bezpečnostním normám. Pro zavedení evidence a dalšího zpracování dat byla vytvořena kancelářská databázová aplikace, splňující požadavky na ochranu dat. Aplikace umožňuje statistiku a současně administraci uživatelů a tagů. K tomu slouží čtečka připojená přes USB pro terénní práci. Zákaznické úpravy a další funkce je možno vytvořit na základě zadání.














