

 Vítejte, dnes je
čtvrtek
24.
duben
2025
Vítejte, dnes je
čtvrtek
24.
duben
2025
Potřebovali jste někdy opravdu velkou sílu? A co třeba super odolnost, výdrž nebo jen taková schopnost pomáhat ochrnutým lidem postavit se znovu na nohy? Jasně, tohle sice může znít jako nesmysl nebo nějaký výjev ze sci-fi, ale opak je pravdou. A nejen to. Současná realita totiž nebude pokulhávat ani v otázce rychlosti.
Mohou za to tzv. „robotické exoskelety“. Takové vnější konstrukce, které obvykle vyrábíme z kovu nebo i jiných odolných materiálů, obepínají lidské tělo a pohybují se stejně jako naše ruce nebo nohy. Pouze s jedním rozdílem – tímto způsobem vznikající robotická schránka tak může činit s větší silou, přesností a rovněž i rychlostí. Pojďme se na vybrané možnosti podívat podrobněji.
Za přispění robotického exoskeletu dokáže člověk zvedat předměty, které mohou vážit i několikanásobek toho, co on sám. Představte si, jaký užitek to může přinést během záchranných prací a také při vyprošťování, kdy například budeme schopni osvobodit lidi uvězněné ve zřícených budovách. V rukou náležitě vyškoleného lidského operátora robotický exoskelet nabídne kombinaci ovladatelnosti a síly, která se v podobných situacích a ve srovnání s tradiční těžkou technikou prokáže být ještě účinnější.
Robotické exoskelety se neunaví podobně jako lidé, a mohou proto stejné úkoly vykonávat dlouhodobě. Lidská obsluha může kromě toho používat výstroj, která pocitově prakticky nic neváží. V praxi to tedy znamená osoby vykonávající s robotickým exoskeletem práci, při které používají těžší nástroje a navíc po delší dobu, než by jinak zvládly. Nasazení větších strojů navíc pomáhá s rychlejším dokončením úkolů a přesné řízení zajišťované takovou schránkou zároveň znamená precizněji odvedenou práci.
Robotické exoskelety máme programovatelné. To znamená, že je lze naučit, jak vykonávat určitou úlohu, které se následně samy ujmou, a lidská posádka pak už jen ohlídá, že se vše děje, jak má. Jindy bude zase člověk dohlížet na celý tým robotů provádějících nejrůznější úkoly, zatímco vedení v klíčových oblastech stále přebírají lidé s patřičnými zkušenostmi.
Rychlost, se kterou budou robotické exoskelety pracovat, nemusíme ani omezovat tím, čeho by byl schopný sám člověk. Opakující se akce, jako je např. mlácení kladivem nebo řezání, se tak mohou citelně zrychlit.
Komplikovanější pohyby zahrnující kupříkladu lezení či běh si však vyžádají zkušenější a také náležitě proškolenou obsluhu. Je sice pravda, že nám lidský mozek neumožní provádět podobné úkony takto rychlým způsobem, nicméně po náležitém výcviku zde přesto pozorujeme super rychlé atlety překonávající jeden rekord za druhým.
Skvělá zpráva je, že se ve všech těchto případech dokážeme při realizaci obejít bez vybraných nových materiálů. V řadě návrhů si totiž plně vystačíme s nerezovou ocelí, zatímco jindy naprosto běžně sáhneme po lehčích alternativách na způsob uhlíkové oceli s vysokou pevností, uhlíkových vláken, chrommolybdenové oceli, hliníku či titanu.
Pokud budou našimi prioritami pevnost a odolnost, zůstaneme při výběru materiálu pravděpodobně u oceli. Při požadavku na větší flexibilitu a také pohotové reakce se výměnou za část výše zmíněného s výhodou použije CrMo. Ve skutečnosti se však robotický exoskelet, stejně jako v případě jakéhokoli jiného složitého stroje, běžně skládá z několika různých materiálů zvolených s ohledem na specifické potřeby jeho konkrétních částí.
Aby mohla robotická vnější kostra vystupovat autonomně, reagovat v reálném čase na podněty lidské osádky, případně se od ní rovnou i učit, neobejde se bez velmi výkonného řídicího systému. Potřebujeme totiž vzít v úvahu data ze senzorů spojených s rovnováhou, okolními podmínkami, vzdáleností k dalším předmětům a rovněž i stavem exoskeletu samotného, zpracovat je a přiměřeně na ně též zareagovat. A bez obtíží se neobejdeme ani v režimu učení, kdy se naše algoritmy budou muset „prokousat“ obrovským množstvím dat. Ta pak, pokud možno, ukládáme lokálně a s využitím polovodičové paměti. Rotační diskové jednotky nelze pro exoskelety provozované v náročných podmínkách s běžným výskytem vibrací doporučit.
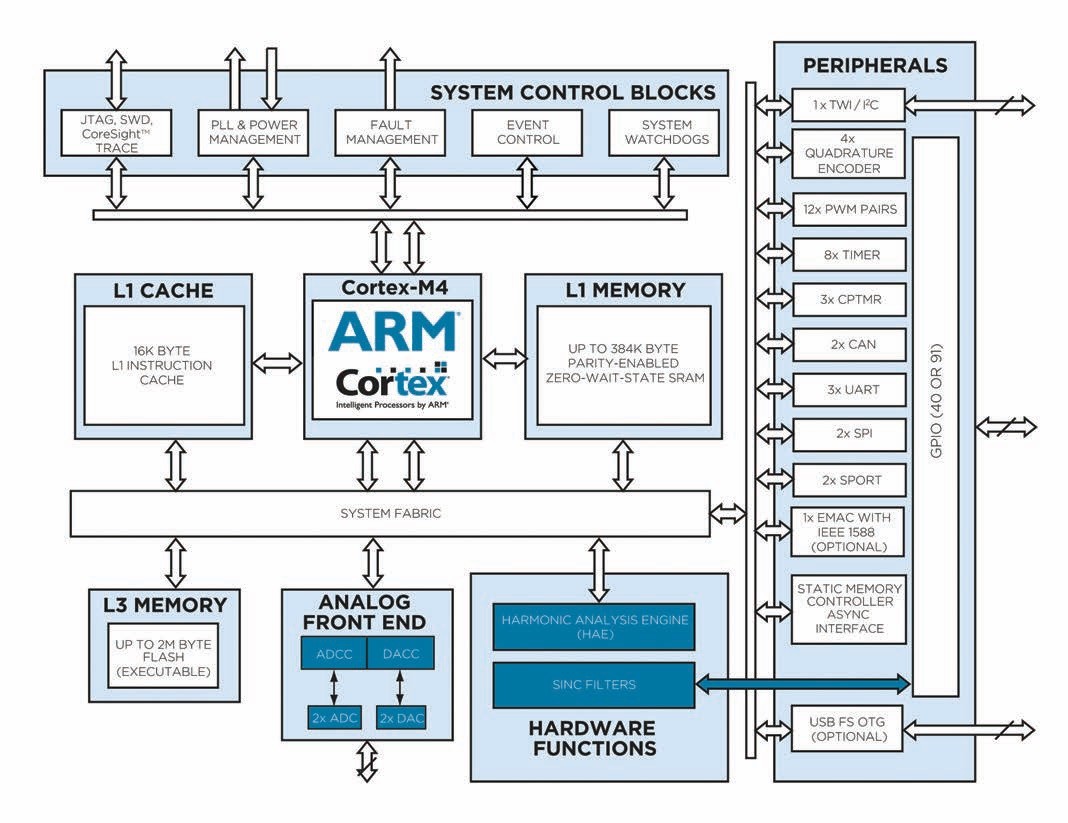
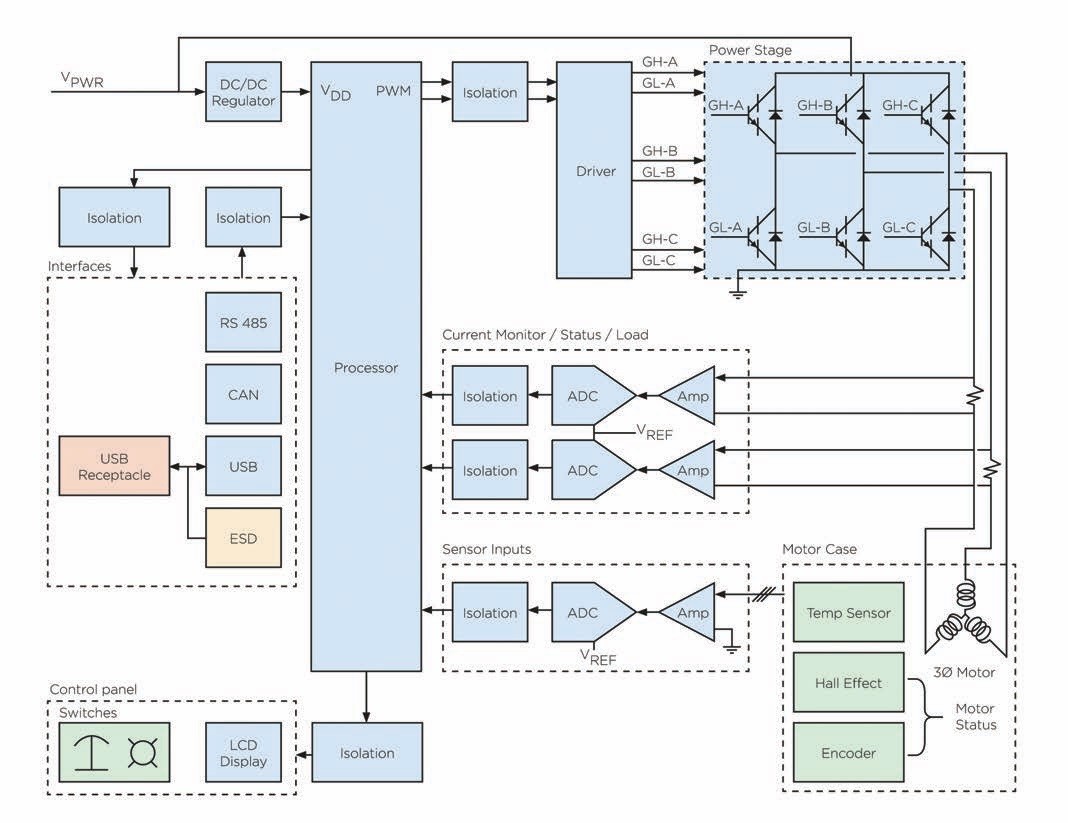
Postupně se tak dostáváme k samotnému výpočetnímu výkonu nezbytnému pro řízení celé řady motorů. Vhodným kandidátem budou např. kontroléry ADSP-CM40 od firmy Analog Devices pracující se smíšenými signály. Díky 240MHz jádru ARM Cortex-M4 jsou prvky CM40 předurčeny právě pro složité metody zpracování signálu, které během řízení robotického exoskeletu využíváme. Na základě vhodného firmwaru pro řízení motorů tak bude možné navýšit účinnost, snížit opotřebení součástí, omezit vibrace a ve výsledku prodloužit i životnost motorů jako takových. Stejně tak se neobejdeme bez algoritmů chránících motor před spálením, ale co je nejdůležitější, potřebujeme při tom všem pečovat především o člověka. To znamená, že budeme schopni stanovit, zda určitý pohyb nebude danou součást příliš namáhat, příp. pro obsluhu nezapříčiní ztrátu rovnováhy. Pokud jde o algoritmy pro řízení motorů, dostáváme na výběr spoustu možností odvíjejících se od způsobu konkrétního využití, zvláště když se neustále potýkáme s nějakými kompromisy. Budeme-li v základu vyžadovat sílu, mohou vyšší úrovně točivého momentu znamenat více než dosahovaná účinnost a vhodným kandidátem se tak stávají bezkartáčové stejnosměrné motory. Očekává se od nás rychlost a přesnost? Vyzkoušejte krokový motor. K dispozici jsou nejrůznější vývojové kity sloužící k řízení motorů, nástroje pro konfiguraci a stejně tak i knihovny. Volbu správného motoru do vašeho robotického projektu blíže rozebírá Bill Schweber [1].
Stále jsme ještě nezmínili způsob, jakým si budou všechny kontroléry, akční členy a čidla posílat data mezi sebou. Podobně jako v jiných případech bude i zde vše záviset na způsobu využití robotického exoskeletu, tzn. otázkách „kde a jak“. Klíčovou roli mnohdy hraje robustnost a bezdrátový přístup tak pokaždé nemusí znamenat výhru, zejména pak v zarušeném či jinak nepříznivém prostředí, takže se často setkáme s pevným propojením stavějícím na masivních konektorech.
Další možností se stávají konektory pro optická vlákna, s nimiž dosahujeme vysokých rychlostí a také obzvláště robustního přenosu dat. Stejně tak odolná však musí být i kabeláž zajišťující spolu se svými konektory rozvod napájení a také výsledné krytí. Spoustu konektorů, které upotřebíme pro optická vlákna a také ve spojení s klasickým datovým či řídicím rozhraním, dodává Molex.
Otázka záchrany života, jak jsme o ní hovořili výše, bude pouze jednou z oblastí, ve kterých mohou robotické schránky se super sílou, výdrží a také rychlostí změnit naše životy. Použijeme je též v boji s ohněm nebo při povodních, kdy pomohou záchranným složkám s nošením těžké výstroje, příp. též se stavbou ochranných či evakuačních hrází pro oběti záplav. Další možnou oblastí nasazení se stávají úniky chemikálií, ovšem jen za předpokladu, že dokážeme dostatečně ochránit jak obsluhu, tak též elektroniku okolo. Samozřejmě však mohou nastat situace, které již budou pro člověka uvnitř příliš riskantní, takže se spíše než na exoskelet spolehneme raději na dálkově naváděného robota.
Ještě jiné využití robotických vnějších koster se přímo v našich životech nabízí pro zraněné či ochrnuté osoby, kterým tak pomohou znovu zajistit určitý stupeň pohyblivosti. Za přispění inteligentních řídicích systémů se taková schránka dokáže učit od svého lidského operátora s cílem provádět vybrané akce sama od sebe. Dokonce i chůze nebo běh mohou být zčásti autonomní záležitostí, takže již jako lidé nepotřebujeme řídit přesně stanovené pohyby na nižší úrovni. A zapomenout nesmíme ani na hotové výzkumy v oblasti bioelektrické aktivity mozku využité při řízení robotických pohybů. Pokud vše propojíme s pokročilými algoritmy učení a také možnostmi autonomního řízení, můžeme dostat řídicí systém ovládaný na velmi vysoké úrovni přímo z naší mysli. Je sice pravda, že tak daleko jsme se ještě nedostali, ale na podobných strhujících možnostech si alespoň ilustrujeme, jak velký potenciál mohou robotické exoskelety pro lidstvo skýtat.
Třída superhrdinů, kterou jsme měli možnost v článku poznat, je díky nejnovějším robotickým exoskeletům a také technologiím, které je podpírají, připravena vyrazit již v tuto chvíli. A to jsme teprve na počátku. Vývoj inteligentních řídicích systémů pak výsledek posune na ještě vyšší úroveň, kdy supersilná a stejně tak i rychlá lidská osádka zachraňuje životy někde po katastrofě. Stejnou měrou však mohou ochrnutí nebo i zranění lidé díky robotickým schránkám znovu získat určitý stupeň pohyblivosti. Takové představy nás nemohou nechat chladnými, vždyť mají potenciál změnit naše životy!














