

 Vítejte, dnes je
středa
01.
duben
2026
Vítejte, dnes je
středa
01.
duben
2026
Když Gordon Moore v roce 1965 napsal [1] „The future of integrated electronics is the future of electronics itself. The advantages of integration will bring about a proliferation of electronics, pushing this science into many new areas.“, zdaleka netušil, kam polovodičový průmysl v následujícím půlstoletí dospěje. Hypotéza, kterou ve svém článku vyslovil (v původním znění [1] „The complexity for minimum component costs has increased at a rate of roughly a factor of two per year. Certainly over the short term this rate can be expected to continue, if not to increase.“) se mezitím (po malé korekci) stala zákonem a nic na tom nemění ani fakt, že se neustále setkáváme se spekulacemi o tom, kdy přestane platit. Nejčastěji udávanou příčinou pro konec platnosti Mooreova zákona je maximální dosažitelná hustota integrace; tranzistory není možné zmenšovat do nekonečna. Hustota integrace ale není jedinou potenciální překážkou pokračování exponenciálního zesložiťování mikroelektronických systémů. Každý čip je dílem lidských rukou a rostoucí integrace a množství funkcí na čipu znamená také rostoucí množství práce (effort, úsilí měřené v člověkoměsících). Přitom čas na návrh, od vzniku specifikace po zahájení prodeje funkčního systému na trhu (tzv. Time To Market, TTM), se odpovídajícím způsobem neprodlužuje. Zpoždění s uvedením produktu na trh přitom může znamenat značné finanční ztráty. To vede k potřebě pracovat rychleji a efektivněji a představuje další významnou hrozbu platnosti Mooreova zákona.
Návrhový cyklus číslicového systému je znázorněn na obr. 1 vlevo. Prvním krokem návrhu musí být vždy specifikace funkce (více viz [2], strana 7). Specifikace je často ve formě obsažného dokumentu popisujícího detailně chování systému; tento dokument je posléze schválen všemi zúčastněnými stranami. V některých případech se lze setkat i s tzv. spustitelnou specifikací – modelem navrhovaného systému, který může být implementován v řadě jazyků (například C, C++, VHDL, Matlab). Zatímco funkce reálného číslicového systému je synchronizována hodinami a systém má definovanou latenci a propustnost, model je implementací samotných algoritmů bez ohledu na hodinové cykly a další reálná omezení. Je tedy implementován na algoritmické, případně transakční úrovni abstrakce. Díky tomu jsou například paměti, které budou v reálném číslicovém systému implementovány pomocí paměťových maker, v modelu realizovány jako jednoduchá pole hodnot. Registry reálného obvodu mohou být modelovány pomocí proměnných používaných algoritmem, aritmetické operace jsou typicky implementovány pomocí pohyblivé řádové čárky. Výhodou modelu je spustitelnost – můžeme mu předložit libovolná vstupní data, na kterých jsou vykonány operace požadované od finálního systému a získat příslušné výstupy jak by je měl produkovat reálný systém.
Model je posléze validován zákazníkem/zadavatelem projektu. Na jeho základě je definována mikroarchitektura obvodu. Ve fázi systémového a mikroarchitektonického návrhu fixujeme strukturu budoucího obvodu, mimo jiné provádíme převod polí a proměnných na paměťová makra a registry, definujeme množství a typy užitých funkčních jednotek (například aritmetických operátorů), propustnost a latenci systému, maximální frekvenci systémových hodin a v neposlední řadě i spotřebu elektrické energie obvodem. Model tedy slouží jako podklad pro implementaci RTL (Register Transfer Level, [2], strana 19) kódu obvodu ve fázi kódování návrhu. Mezi RTL kódem a modelem je ovšem zásadní rozdíl: model říká co se má dělat, RTL kód potom jak se to má dělat. RTL kód je implementován typicky v jazyce VHDL nebo Verilog. Tradiční přístup k mikroarchitektonickému návrhu představuje ruční práce, fáze je poměrně časově náročná.
Dalším nezbytným krokem po vlastní implementaci RTL je verifikace navrženého obvodu – ověření správnosti návrhu. Navržený obvod je testován pomocí série simulací, je kontrolováno jeho správné chování proti původnímu modelu (viz [3] a obr. 1, pravá část) a postupně jsou odstraňovány jednotlivé chyby. Jedním typem chyb jsou chyby, které vznikají během vlastní konverze modelu na RTL úroveň; takové lze většinou snadno najít a rychle odstranit. Obranou proti nim je precizně pracující návrhář a pečlivé provádění důkladných simulací navrhovaného obvodu. Jinou kategorií chyb jsou koncepční chyby ve fázi definice mikroarchitektury obvodu, takové ale skýtají riziko kompletního přepracování celého systému a potenciální časovou ztrátu až mnoha člověkoměsíců práce. Hororový scénář potom představuje změna modelu systému v důsledku změny požadavků zákazníka, nejlépe před vlastním koncem projektu. Potom hrozí potřeba kompletního přepracování mikroarchitektonického návrhu i RTL kódu s obrovskými časovými ztrátami.
![Obr. 1 Návrhový cyklus číslicového systému na FPGA a základní postup při verifikaci obvodu [2] (DUT=Design Under Test).](/getFile/id:6795/Obr. 1 Návrhový cyklus číslicového systému na FPGA a základní postup při verifikaci obvodu [2] (DUT=Design Under Test)..jpg)
Obr. 1 Návrhový cyklus číslicového systému na FPGA a základní postup při verifikaci obvodu [2] (DUT=Design Under Test).
Všechny tyto kroky (systémový a mikroarchitektonický návrh, kódování na RTL úrovni a verifikace) jsou velmi časově náročné a chceme-li dosáhnout zrychlení návrhového cyklu, musíme zrychlit jejich provádění. Zrychlení můžeme dosáhnout více způsoby: například fázi kódování RTL návrhu lze zkrátit užitím již dříve navržených a odladěných bloků – jader (IP cores, Intellectual Property, viz např. [4]). Tím se lze dobrat i ke zkrácení následné fáze verifikace, protože už jednou odladěná jádra většinou nebudou vyžadovat takové úsilí strávené hledáním a laděním chyb. Projektoví manažeři dobrodružnějších povah mohou také vynechat část verifikačních simulací testujících některé důvěryhodnější funkce těchto jader (i když vlastní zkušenosti autora bohužel spíše ukazují, že co se nezverifikovalo, nebude fungovat a že ani profesionálně udělaná jádra nejsou bez chyb). Dalšího urychlení verifikace lze dosáhnout použitím formální verifikace, inteligentnějších verifikačních technik (například randomizované verifikace proti modelu) a programovacích jazyků s podporou pro tyto techniky (například SystemVerilog).
Nicméně i po aplikaci všech uvedených opatření stále zůstává v návrhovém cyklu (viz obr. 1) časově náročná fáze ručního mikroarchitektonického návrhu.
V tomto okamžiku je zajímavé se zamyslet nad paralelami mezi návrhem hardware a programováním software. Vlastní proces konverze software do spustitelného binárního souboru je dnes extrémně jednoduchý. Prostým stiskem tlačítka v integrovaném návrhovém prostředí (IDE, Integrated Development Environment) získáme po krátkém čekání spustitelný kód – a je hotovo. Proč není něco podobného možné při konverzi modelu systému např. v C++ do RTL kódu?
Skutečně, tato myšlenka už mnoho let není horkou novinkou a existují komerční i akademické nástroje, které tento proces dokáží automatizovat. Jedná se nicméně o algoritmicky velmi složitou úlohu a tak je třeba počítat s jistými omezeními. Proces konverze se nazývá „syntézou z algoritmu“, případně „syntézou na vyšší úrovni“; my se budeme dále držet zkratky HLS (High Level Synthesis).
Předně, mezi návrhem hardware a programováním software je mnoho rozdílů. Programujeme-li software, výstupem je spustitelný soubor, kód optimalizujeme typicky na rychlost běhu, jen výjimečně velikost (embedded aplikace) a většinou ani není třeba se trápit s omezeními, která by například bránila používat mnoho proměnných, či velká pomocná pole. Častou praktikou je například ukládání velkého množství předpočítaných hodnot pro urychlení dalšího běhu programu. Oproti tomu při návrhu hardware je výstupem polovodičový čip nebo konfigurovaný FPGA obvod, a musíme tedy mít na mysli omezení daná fyzikálními zákony i při vlastním psaní RTL kódu. Vlastní postup i jen samotné „konverze“ RTL kódu do podoby polovodičové struktury je netriviální a rozhodně ho nelze provést stiskem tlačítka „compile“ jako u programování. Obvykle si také nemůžeme dovolit operovat s velkými pomocnými paměťmi a optimalizaci výsledného produktu provádíme na datovou propustnost, latenci zpracování, spotřebu elektrické energie, maximální dosažitelnou hodinovou frekvenci a občas i na další (z pohledu programátora poněkud obskurní) parametry – například propojitelnost (routability) nebo utilizaci plochy čipu. Z těchto důvodů také na úrovni kódování často rozlišujeme mezi návrhem a programováním.
Z uvedeného srovnání vyplývá, že proces přímé konverze algoritmu do RTL kódu bude automatizovatelný jen s řadou omezení. To nejmarkantnější je, že nelze konvertovat kód zapsaný libovolným způsobem; i v tomto případě je třeba se seznámit se syntetizovatelnou podmnožinou použitého programovacího jazyka a stále přemýšlet nad vlastní implementací.
Abychom čtenáři proces konverze algoritmu na RTL úroveň více přiblížili, připravili jsme jednoduchý demonstrační příklad – implementaci bloku pro výpočet druhé odmocniny technikou půlení intervalu na FPGA obvod. Použití HLS samozřejmě není omezeno jen na FPGA. FPGA platforma byla zvolena z didaktických důvodů.
Ve výpisu 1 je zdrojový kód modelu bloku pro výpočet druhé odmocniny; vstupem je 16 bitů široké celé číslo a bez znaménka, výstupem x, pro které platí, že x2 ≤a. Ve výpisu 2 je pak možné nalézt model přepsaný do podoby odpovídající zadání – vstupem bloku je 16 bitů široké číslo a bez znaménka (datový typ ac_int<16,false>), tělo algoritmu je zkráceno jen na 8 iterací – v každé iteraci se interval obsahující výsledek zkrátí na polovinu a výsledek se tak zpřesní o jeden bit. Výsledek je ovšem osmibitový, bez znaménka (datový typ ac_int<8,false >), protože je odmocninou ze 16 bitového čísla, proto jen 8 opakování for cyklu. Konečně výpis 3 prezentuje jednoduché testovací prostředí, které ukazuje, že upravený algoritmus funguje stejně jako původní model.
Výpis 1: Model bloku pro výpočet druhé odmocniny
unsigned model_square_root (unsigned a)
{
unsigned sq_hi = 255;
unsigned sq_lo = 0;
unsigned sq_tmp = 0;
for (int cycle=0;cycle<16;cycle++)
{
sq_tmp = (sq_hi+sq_lo)/2;
if ( (sq_tmp*sq_tmp) > a) {
sq_hi = sq_tmp;
} else {
sq_lo = sq_tmp;
}
}
return sq_lo;
}
Výpis 2: Zdrojový kód algoritmu v „syntetizovatelné podmnožině“ C++
#include <ac_int.h>
ac_int<8,false> square_root (ac_int<16,false> a)
{
ac_int<8,false> sq_hi = 255;
ac_int<8,false> sq_lo = 0;
ac_int<8,false> sq_tmp = 0;
for (int cycle=0;cycle<8;cycle++) //++ acc_n4_l8
{
sq_tmp = (sq_hi+sq_lo)/2; //+ acc_n9_l10
if ( (sq_tmp*sq_tmp) > a) { //* mul_n16_l11
sq_hi = sq_tmp; //> acc_u18_l11
} else {
sq_lo = sq_tmp;
}
}
return sq_lo;
}
Výpis 3: Verifikační prostředí pro algoritmus výpočtu druhé odmocniny
void tb_run (void)
{
int fi_match = 0;
int fi_mismatch = 0;
for (int i = 0; i < 64; i++)
{
int test_num = rand()&0xFFFF;
int dut_out = square_root(test_num);
int cpp_out = model_square_root(test_num);
cout << ″Input:″ << test_num << ″ DUT output:″ << dut_out <<
″ SQRT output:″ << cpp_out << ″\n″;
fi_match += (dut_out==cpp_out);
fi_mismatch += (dut_out!=cpp_out);
}
cout << ″Matches: ″ << fi_match << ″ Mismatches: ″ << fi_mismatch << ″\n″;
}
Pro syntézu ukázkového příkladu byl použit HLS nástroj Catapult C [5]. Zdrojový kód byl načten do HLS nástroje a byly nastaveny základní parametry řídící proces syntézy: z didaktických důvodů jsme zvolili implementaci do obvodu Spartan 2E s maximální pracovní frekvencí fclkmax=20 MHz. Dalším krokem už bylo spuštění operace plánování zdrojů (Schedule) a následného generování RTL kódu (Generate RTL). Výstupem nástroje byl přehledný Ganttův diagram plánování operací, viz obr. 2. V diagramu vidíme, v jaké sekvenci budou prováděny jednotlivé operace ze zdrojového kódu (ve výpisu 2 jsou v komentářích uvedeny názvy operací), v jakém cyklu hodin (každý rámeček „Cx“ je jeden hodinový cyklus obvodu) a dále jak na sobě jednotlivé operace závisí (např. u násobení vidíme, že je závislé na výsledku průměrování a jeho výsledek je dále potřebný pro operaci komparace realizovanou pomocí sčítačky).
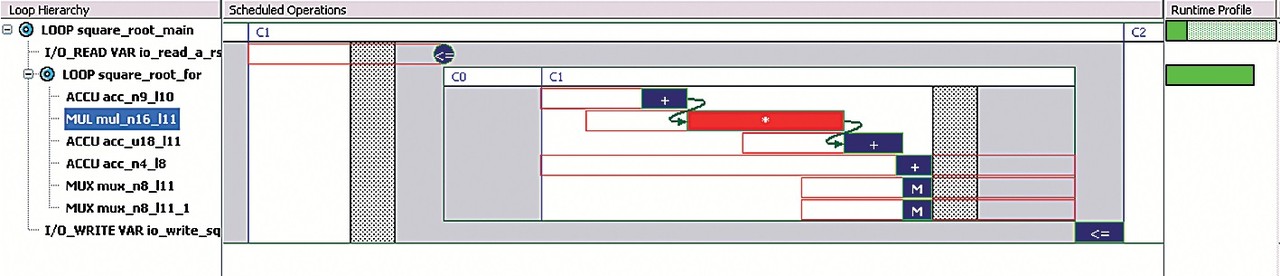
Obr. 2 Plánování operací
Vygenerovaný RTL kód posléze můžeme načíst do simulátoru a ověřit jeho správnou funkci verifikací, viz obr. 3. Funguje-li dle očekávání, použijeme nástroje pro implementaci na FPGA obvodech (např. ISE fy Xilinx) a vygenerujeme přímo konfiguraci programovatelného obvodu. Celý proces konverze C++ do RTL kódu trval jen minuty a v tomto jednoduchém případě jsou výsledky srovnatelné s ruční prací, srovnej [2], kapitola 7, kde je stejný blok implementován ručně. Zájemce o hlubší pochopení práce HLS nástroje odkazujeme na stejný zdroj, kde je popsán postup ruční syntézy datové cesty; HLS nástroj pracuje velmi podobným způsobem. Více detailů o HLS pak lze nalézt v [6].

Obr. 3 Demonstrace funkce obvodu v simulátoru ModelSim. Zelenou tečkou je vyznačena počáteční hodnota a červenou tečkou finální výstup obvodu (1112=12321). Všimněte si signálů, které jsou připojeny na výstup registrů implementujících jednotlivé proměnné algoritmu – sq_hi, sq_lo a cycle.
Opravdový půvab HLS vynikne, pokud budeme potřebovat změnit specifikaci systému: například zákazník přijde se změnou požadavku – z nových skutečností vyplývá, že fclkmax=100 MHz, ne 20 MHz. Na použitém FPGA obvodu toto není triviální požadavek, obvod totiž neobsahuje hardwarové násobičky a zvýšení pracovní frekvence znamená nutnost použít pipelinovanou násobičku, místo čistě kombinačního obvodu. To s sebou nese nezanedbatelné množství práce, protože kromě změny násobičky je ještě třeba změnit i řídicí automat obvodu. Používáme-li HLS nástroje, stačí jen přenastavit pracovní frekvenci na 100 MHz a opětovně spustit celý proces syntézy; po zhruba minutě práce nástroje dostaneme nové RTL kódy a Ganttův diagram na obr. 4. Vidíme, že násobení bylo nyní automaticky rozděleno do čtyř hodinových cyklů. Problém je tedy vyřešen.

Obr. 4 Plánování operací pro pracovní frekvenci 100 MHz
HLS přístup přináší nesporné zkrácení návrhového cyklu; konverze modelu na RTL kód je rychlá a práce, která by jinak trvala i mnoho týdnů, je provedena doslova za desítky minut. Rychlost a pohodlí generování RTL kódu s sebou přináší i doposud netušené možnosti rychlého experimentování s mikroarchitekturou a provádění tzv. what-if (co-kdyby?) analýzy. Jsme tak schopni rychle odpovědět na otázky typu „Co se stane, když budu chtít vyšší fclkmax?“ nebo „K čemu dojde, když budu chtít, aby celý výpočet byl implementovaný pomocí proudového zpracování s latencí 5 cyklů?“ atd. Díky tomu lze během jediného dne prozkoumat řadu alternativ a zvolit nejvhodnější mikroarchitekturu systému. Můžeme tak řešit potenciální problémy s časováním obvodu, plochou a příkonem mnohem dříve, než při použití standardního přístupu. Získat okamžitou odpověď na takové otázky je při ruční implementaci RTL kódu velmi obtížné.
Nespornou výhodou je dále skutečnost, že odladěný model – abstraktní algoritmus – zůstává hlavním zdrojovým kódem pro implementaci na RTL úrovni. Jeho změna v důsledku nových požadavků zákazníka tak místo na přepisování RTL kódu vede jen na elegantní přegenerování RTL pomocí HLS nástroje. Celý proces je navíc automatický a tedy bez náhodných chyb vnesených návrháři.
V neposlední řadě se rapidně zjednodušuje i znovupoužití jader. Blok implementovaný v C++ můžeme vysyntetizovat s různými parametry mikroarchitektury (např. minimalizovanou plochou, spotřebou nebo latencí) podle požadavků aplikace. To je něco, co je ve světě znovupoužívání RTL jader nemožné bez přepracování tzv. „znovupoužitého“ bloku, čímž se ztrácí všechny výhody opětovného použití. HLS zjednodušuje i přenos bloků mezi technologickými knihovnami pro návrh ASIC obvodů, případně FPGA platformami. RTL kód ve skutečnosti nikdy není zcela technologicky nezávislý, na úrovni C++ je ovšem technologická nezávislost vynucena.
Všechny uvedené výhody jsou ovšem vyváženy mnohými negativy. V prvé řadě HLS nástroje nejsou schopny dosáhnout kvality výsledku, jakou dosáhne zkušený návrhář implementující pečlivě vyladěný systém. Proto použití HLS není vhodné např. pro implementaci obvodů typu RFID, kde je nutné počítat s každým klopicím hradlem z důvodů maximálního omezení spotřeby elektrické energie obvodem. Použití HLS syntézy s sebou také přináší závislost na nástroji jednoho zvoleného výrobce, zatímco RTL syntéza je průmyslový standard a při přechodu mezi nástroji obvykle nenastávají dramatické situace. HLS nástroje ani nepatří k nejlevnějším. A v neposlední řadě je třeba se naučit nový návrhový jazyk: HLS syntéza vyžaduje, aby byl syntetizovatelný C++ kód zapsaný specifickým způsobem, při jeho psaní je stále nutno přemýšlet nad tím, jak bude vypadat výsledná polovodičová struktura. To spolu s faktem, že (na rozdíl od nástrojů pro programování) zde stále neexistuje řešení pracující na jeden „triviální“ stisk tlačítka s sebou nese jednoduché poselství: bylo by vážnou chybou se domnívat, že používání HLS zcela nahradí zkušenosti návrhářů.
Za dnešního stavu věci je tak HLS nejvhodnější pro realizaci větších jader implementujících složité výpočetní algoritmy (např. komprese a dekomprese videa, digitální rádiové aplikace atd.) bez kritických nároků na spotřebu elektrické energie obvodem a plochu zabranou čipem. Tato jádra pak mohou být složena dohromady se zbytkem systému implementovaného pomocí standardního postupu. Právě proto, aby byla možná snadná integrace produktu navrženého pomocí HLS s existujícími bloky, je výstupem HLS nástroje RTL kód. Použití HLS nástroje tedy typicky neodstraňuje potřebu použití standardní RTL syntézy a stále vyžaduje expertizu s tím spojenou.
Polovodičový průmysl, zejména metodologie návrhu číslicových systémů, prochází neustálou evolucí směřující k vyšší produktivitě práce návrhářů, a když ne ke snížení, tak aspoň k zachování TTM. Opravdoví pamětníci si mohou vzpomenout na „pravěké“ techniky plně ručního návrhu, zavedení prvních CAD nástrojů a posléze revoluční příchod RTL syntézy. Mladší návrháři potom byli „zasaženi“ příchodem assertions do běžné praxe, randomizovanou verifikací a dalšími technikami automatizace verifikace. V tomto kontextu je HLS jen logickým důsledkem vývoje polovodičového průmyslu. A jako u předchozích evolučních kroků, i zde je tichý příslib řádového zvýšení produktivity práce za předpokladu správného užití nástrojů; zda se HLS rozšíří tak jako RTL syntéza, ukáže čas.
Tato práce byla podpořena grantem GAČR 102-11-1795: Novel selective transforms for non stationary signal processing.
[1] Gordon Moore. Cramming more components onto integrated circuits. Electronics. vol. 38, no. 9, April 19 1965
[2] Jakub Šťastný. FPGA prakticky, BEN Praha 2011. http://shop.ben. cz/cz/121316-fpga-prakticky.aspx (kontrolováno 17. 11. 2011)
[3] Lukáš Ručkay, Tomáš Kubec, Jakub Šťastný. Z08-2: Návrh verifikačního prostředí pro FPGA bloky. FEL ČVUT v Praze, Katedra teorie obvodů. http://amber.feld.cvut.cz/ fpga/publications (kontrolováno 17. 11. 2011)
[4] Design & Reuse. http://www.design reuse.com/ (kontrolováno 17. 11. 2011)
[5] Mentor Graphics. Catapult C. http:// www.mentor.com/esl/catapult/overview (kontrolováno 17. 11. 2011)
[6] Michael Fingeroff. HLS Blue Book. http://www.hlsbluebook.com (kontrolováno 17. 11. 2011)

