

 Vítejte, dnes je
středa
07.
květen
2025
Vítejte, dnes je
středa
07.
květen
2025
Tradiční lineární regulátory napětí mají jednu zásadní nevýhodu: produkují odpadní tepelný výkon, jenž je součinem úbytku napětí na regulátoru násobeného odebíraným proudem plus vlastní spotřeba regulátoru. Tento tepelný výkon jednak zhoršuje účinnost napáječe, jednak musí být odveden ze zařízení v podobě tepla a je důvodem nutnosti chladiče. Alternativou je regulátor pracující ve spínaném režimu, kdy jeho spínací prvek periodicky spíná a rozpíná proud ze vstupu s proměnnou střídou a střída tohoto děje je určující pro výstupní napětí po průchodu výstupním filtrem.
Na trhu je mnoho integrovaných obvodů, které s minimem vnějších součástek realizují spínaný regulátor. Mezi nejjednodušší patří snižující (buck) regulátor (obr. 1) nebo zvyšující (boost) anebo invertující (buck-boost) regulátor. Protože cílem tohoto článku je poskytnout jednoduché doporučení pro volbu akumulačního induktoru, budeme se zabývat jen buck-regulátorem.
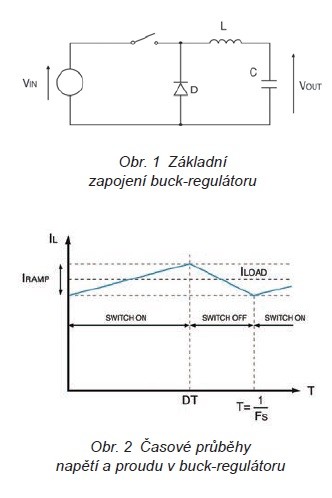
Jeho činnost lze popsat tak, že (předpokládáme Vin > Vout) ze zdroje vstupního napětí Vin je přes střídou řízený spínač propouštěn a zavírán proud přes induktor L do výstupního kapacitoru C držícího výstupní napětí Vout, z nějž odtéká výstupní proud Iload do zátěže – spotřebiče.
Je-li spínač sepnut, induktor se „nabíjí“ připojeným rozdílovým napětím (Uin- -Uout) a proud jím narůstá. Dioda je po tuto dobu závěrně polarizovaná, proud jí neteče. Kapacitor se nabíjí přes induktor, ale pomalu, a tak ss napětí na něm je jen zvlněné.
Když se spínač rozpojí, induktor jako setrvačník stále chce, aby jím tekl proud, a proto si ho „vezme“ z nuly zdroje přes diodu, která se nyní otevře. Proud diodou klesá, protože v tomto stavu je na induktoru napětí opačné polarity než prve, zhruba -Uout, a induktor se tedy „vybíjí“. Na výstupním C naměříme pokles napětí díky odtékajícímu proudu Iload a klesajícímu proudu z diody. Proudovou sondou bychom naměřili trojúhelníkový průběh proudu, složený z „ramp“ a odpovídající stavům On a Off. Střední hodnota tohoto proudu odtéká do zátěže, a je značena ILoad na obr. 2.
Na obr. 1 není nakreslena řada prvků. Kromě přívodů a vstupního filtru (předpokládáme ideální zdroj napětí) zde není zpětnovazební obvod, který ovlivňuje střídu spínání. Zpětnovazební obvod zpravidla porovnává vzorek výstupního napětí (podělený odporovým děličem) s interní referencí – stabilním napětím. Kromě toho regulátor má zpravidla obvody pro ochranu, proudovou limitaci a pozvolný náběh výstupního napětí, synchronizaci, kompenzační obvod a další. Za výstupním kapacitorem zpravidla následuje další LC filtr pro potlačení rušení.
Na obr. 2 jsou znázorněny děje při sepnutém stavu spínače (On-time) a rozpojeném stavu (Off-time). Součet těchto časů je převrácenou hodnotou opakovací frekvence Fs.
Vout = D * Vin
kde D je střída (duty cycle) definovaná jako D = ton / (ton + toff) = ton / T.
Spínací frekvence Fs = 1 / (ton + toff), a tedy ton = D/Fs.
Funkce regulátoru je integrována zpravidla v jediném integrovaném obvodu, takže zdánlivě je vše jednoduše vyřešeno. Jedna součástka je však nenahraditelná a tou je induktor. Tato součástka, podobně jako kapacitor, je schopna v sobě akumulovat energii ve formě elektro-magnetického pole a poté ji zase odevzdat. Ale není možno ji realizovat „křemíkem“. Naopak vyžaduje feromagnetické jádro.
Čím vyšší je frekvence spínání regulátoru, tím může být indukčnost menší, protože se zmenší zvlnění, ale zase narůstají spínací ztráty a ztráty v magnetiku i rušení. Proto je Fs výsledkem kompromisu tvůrců obvodu regulátoru.
Na induktor je kladen základní požadavek: musí být stále induktorem i při maximálním proudu, tedy nesmí se nasytit jeho jádro, kdy by se akumulovaná energie měnila v teplo a hlavně proud by nekontrolovaně narůstal. Každý induktor, resp. feromagnetické jádro, má charakteristickou maximální hodnotu značenou zkráceně ʃ u dt a platí
L * I = ʃ u (t) dt (1)
s rozměry [ H, A, V, s ]
kde u(t) je připojené napětí a integrál dt odpovídá času, po který se vyvozený proud zvětšuje lineárně na Imax a vratně (jádro se ještě nepřesytí).
Tato hodnota odpovídá požadované akumulované energii elektromagnetického pole jádra v jednom cyklu:
WL = (LI2) (2)
s rozměry [J, H, A], častěji [mJ, mH, A]
Tato hodnota by správně měla být ještě dělena dvěma, podle analogie s energií nabitého kapacitoru
WC = (CU2)/2 [J, F, V] (3)
ale výrobci magnetických materiálů a součástek zpravidla pracují s výše popsanou hodnotou, která kupodivu souvisí ani ne s tvarem jádra, ale s jeho hmotností, tedy množstvím materiálu.
Nejprve zjistíme frekvenci regulátoru a maximální proud induktorem, který je součtem střední hodnoty odebíraného proudu plus zvlnění. Zhruba to zkontrolujeme pomocí zjednodušené rovnice (1), kde jsme integrál nahradili součinem:
L = (Uin – Uout) * Ton / Imax (4)
a střídu D volíme v případě buck-regulátoru blízko jedné, a tedy Ton volíme blízko Ts.
Tím získáme hodnoty L a Imax a spočítáme špičkový (celkový) proud induktorem:
Ipk = Iload + Imax
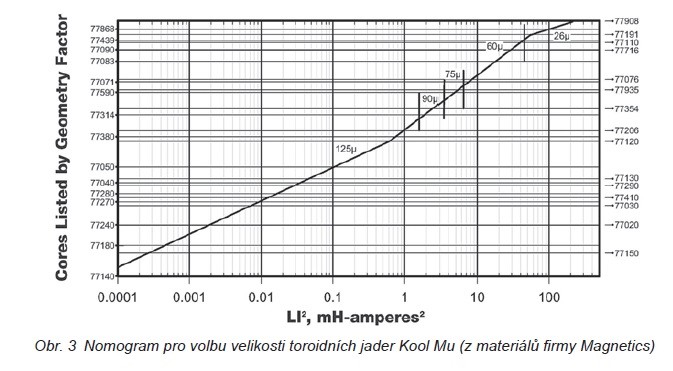
V katalogu kvalitního výrobce jader vyhledáme v tabulce nebo nomogramu takové jádro, které pojme požadovanou energii cyklu (L * Ipk2), a modlíme se, aby magnetikum nemělo velké dynamické ztráty.
Máme velmi dobré zkušenosti s práškovými jádry výrobce Magnetics z USA, které jsme v Rystonu začali používat v roce 1995. Materiálem s dobrými vlastnostmi za přijatelnou cenu je prášek Kool Mu, z nějž se lisují toroidní jádra a EI, C, U tvary. Dále jsou vyráběny ještě lepší, ale dražší materiály MPP-MolyPermalloy, High Flux, Xflux a další.
Kool Mu materiál má vysokou hodnotu nasycení Bmax asi 2 Tesla a pozvolný úbytek permeability blízko nasycení, takže proudově zatížené (nekompenzované) akumulační tlumivky vycházejí přijatelně malé, a má velice malé ztráty v magnetiku (úměrné frekvenci), takže lze induktory použít i ve spínaných regulátorech s vysokým kmitočtem spínání. Navíc má vysokou Curieovu teplotu (teplota, kdy ztratí feromagnetismus). Jádra z něj jsou vyráběna lisováním za studena a mají rozloženou vzduchovou mezeru, což ještě snižuje rušení. Navíc jsou tolerance magnetických parametrů poměrně úzké (8 %).
Oproti tomu ferity s probroušenou vzduchovou mezerou mají kvůli nízké Curieově teplotě omezení pracovní teploty na asi 80 °C, vyžadují chlazení a díky mezeře mají vyšší emise rušení. Levné železoprachové toroidy čínské výroby zase mají mnohem vyšší ztráty v magnetiku a díky magnetostrikci „pískají“ a ruší. Jejich tolerance je mnohem širší (50 %).
Pomocí volby podle parametru (L Imax2) většinou najdeme několik tvarů toroidních jader a podle zvolené proudové hustoty zjistíme požadovaný průřez vodiče. Poté z nabídky vybereme takové toroidní jádro s potřebným μ a z něj plynoucím koeficientem indukčnosti k počtu závitů (AL), aby vinutí vyšlo provést do otvoru v jádře. Můžeme použít jádra E (2 ks v jedné sadě) a k nim padnoucí kostřičku. Takto vzniklá součástka je však poněkud rozměrná.
My raději volíme toroidní jádra, a to tak, aby vinutí vyšlo právě na jednu vrstvu na toroidu, což je dáno vnitřním průměrem toroidu (tam se dráty musí stěsnat). Tak je zajištěno optimální chlazení, nízké ztráty, rozptyl magnetického pole a malé emise rušení. Navíc jsou toroidy od firmy Magnetics pokryty nylonovým povlakem s izolací 500 V a dobrou tepelnou vodivostí pro chlazení.
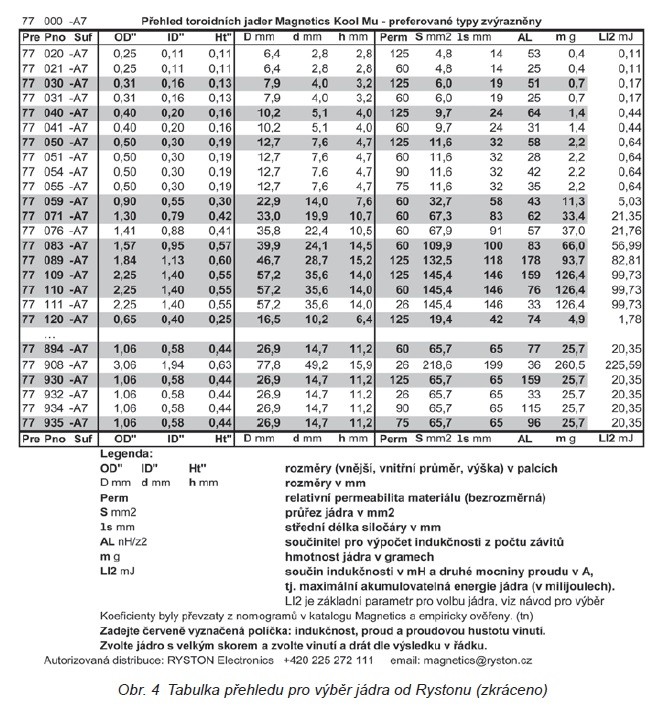
Pro doplnění a kontrolu volby jádra jsme si vytvořili tabulku, která je současně přehledem sortimentu se zvýrazněnými preferovanými typy, obvykle těmi s nejvyšší permeabilitou při daných rozměrech. Sortiment jader pokrývá rozsah L I2 od 0,02 do 280 mJ. Zkrácená ukázka je na obr. 4 (tabulka je normálně na čtyři strany). Do excelové tabulky se může vložit požadovaná indukčnost a proud induktorem (při zadané proudové hustotě) a použitelná jádra dají „skóre“, my zvolíme většinou to s nejvyšším skórem.
Je možno dále provést několik „laciných triků“: například pro induktor použijeme ne jedno, ale dvě jádra na sobě anebo zkombinujeme dva typy či materiály se stejnými rozměry. Některé spínané regulátory mají rády při malé střídě vyšší indukčnost, ale při velké střídě jim stačí nižší. Pokud se jedno z jader s velkým μ už začne sytit, druhé jádro ještě ne a funguje při vyšším proudu. Tyto triky je však nutno prakticky ověřit.
Toroidní tlumivku lze za odizolované vodiče připájet přímo do desky plošných spojů, upevnit ji na DPS třeba plastovým šroubem či přilepit k destičce silikonovým lepidlem (jádro něco váží) naležato či nastojato. Musíme si pro ni připravit v knihovně správný knihovní prvek a vyřešit její upevnění. Oproti jiným provedením je takto vzniklá součástka poměrně malá, ale přesto se dobře chladí. Pro montáž existují i „základny“ z plastu s vývody, které výrobce rovněž dodává, anebo „boudičky”, do nichž lze zalít jádro s vinutím zalévací hmotou.
Firma Ryston je autorizovaným distributorem jader a dalších součástek firmy Magnetics. Máme letité zkušenosti s vývojem a výrobou spínaných napáječů všech typů. Volbu jader pro ně anebo pro EMI filtry jsme si usnadnili tabulkou s přehledem dostupných typů. Pro vývoj nabízíme zákazníkům odborné poradenství, vzorky, měření a zhotovení prototypů.
[1] Ryston Electronics: Přehled toroidních jader Kool Mu, www.ryston.cz
[2] Magnetics Inc: Kool Mu, Powder Cores Catalog, www.mag-inc.com
[3] Rhine, Mitchell, SIG Co.: How to choose a SMD inductor…, Electronic Products Magazine














