

 Vítejte, dnes je
úterý
17.
březen
2026
Vítejte, dnes je
úterý
17.
březen
2026
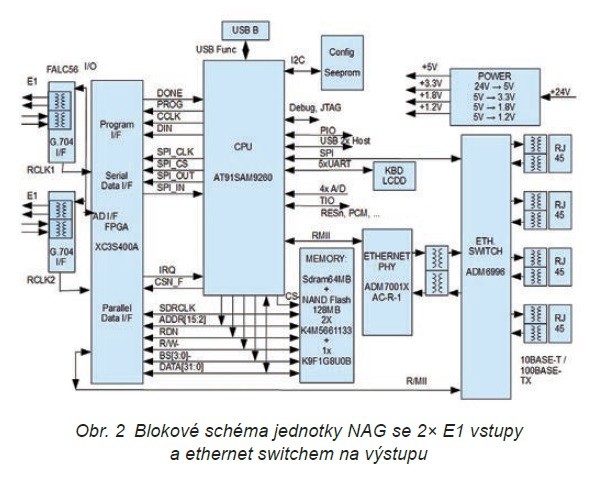
V Rystonu se dlouhodobě zabýváme vývojem komunikačních zařízení pro náročné aplikace, které kromě základní funkce přenosu dat splňují požadavky odolnosti proti poruchám, redundance, zabezpečení dat a vzdáleného dohledu. Jedním z projektů vlastního vývoje byla jednotka NAG obsahující vestavný mikropočítač s OS RT-Linux spolupracující s obvodem FPGA Xilinx-Spartan. K tomuto systému je připojeno jedno nebo více rozhraní E1 (G.703) s framerem FALC56.
Vedení E1 je plesiochronní, tedy s přibližně (ale ne zcela) synchronními hodinami bitové sekvence. Podřízené rozhraní se musí zasynchronizovat na přicházející signál od nadřazeného uzlu sítě, jehož frekvence může v určitých mezích (zhruba ±50 ppm) kolísat podle charakteru přenosové trasy, např. vlivem dopplerovského posunu vzniklého pohybem telekomunikačních družic.
Je-li připojeno více rozhraní E1, popř. E2 a vyšších, jedno z nich řídí synchronizaci a ta ostatní jsou „zavěšena“ na svých zdrojích signálu, a tak vzniká potřeba sladit několik nesynchronních systémů. To může mít za následek měnící se fázová zpoždění mezi signály a následné hazardní stavy.
Obvod FPGA, mimo další funkce, funguje jako „lepidlo“ mezi doménami systému podléhajícími různým zdrojům časování: hodinám procesoru, které řídí cykly sběrnice a přijímaným hodinám rozhraní E1.
Obvod FPGA musí být po zapnutí nebo resetu nainicializován z procesoru, protože jeho vnitřní obvody jsou volatilní (závislé na napájení). Vznikla otázka, jak nejlépe propojit procesor a FPGA, aby jejich komunikace v prostředí víceúlohového operačního systému probíhala optimálně.
Proto ze strany procesoru byl obvod FPGA umístěn do jeho 32bitového paměťového prostoru a k přístupu do něj slouží dva z procesorem generovaných selektových signálů. Obvod FPGA se chová vůči procesoru jako oblast rychlé dvouportové paměti RAM, takže běžící procesy mohou velmi rychle nezávisle komunikovat s blokem, který je jim přidělen. Velikost, struktura a významy jednotlivých bitů jsou určeny firmwarem FPGA.
Modul CPUI je částí programu v FPGA a tvoří datové (sběrnicové) rozhraní mezi nadřízeným procesorem a uživatelskou aplikací v FPGA. Skládá se z určitého počtu „bran“ – bloků paměti s asynchronním přístupem.
Brána může fungovat například jako dvouportová, semafory/ ukazateli řízená paměť zpráv, do níž se z venku zapisuje a zprávy jsou vybírány nějakým procesem uvnitř FPGA, nebo naopak.
Počet bran je limitován velikostí FPGA a volným adresovým prostorem procesoru. Konkrétní počet je dán parametrem NumOfPorts.
Každá z bran zaujímá prostor 2048 bytů v adresovém prostoru procesoru, a jeví se tedy jako kus jeho paměti.
Offset bran je definován parametrem Offsets(n). Offsets je pole typu integer, počet prvků je roven NumOfPorts. Prvky pole jsou násobkem 2048 a navzájem různé. Brána má 32bitový vstup/výstup dat na datovou sběrnici, 9bitovou adresovou sběrnici, 4bitový signál BSn pro práci s jednotlivými byty v 32bitovém slově a signál zápisu WRn a čtení RDn a souhrnnou žádost o přerušení pro procesor. Viz obr. 1.
Přitom spojení obou subsystémů přes sběrnici je velice volné a umožňuje multiprocesovou komunikaci.
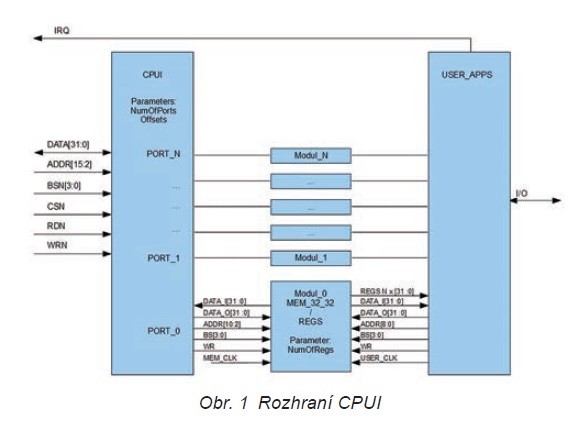
Pokud aplikace v FPGA využívá pro komunikaci s nadřízeným procesorem dvouportové paměti, je možno použít modul mem/regs. Tento modul zaujímá adresový prostor 2048 bytů. V tomto adresovém prostoru může být pole 32bitových registrů a vlastní paměť. Počet registrů je určen parametrem NumOfRegs. Registry jsou mapovány od konce adresového prostoru a zmenšují velikost využitelné dvouportové paměti. Počet registrů je limitován velikostí adresového prostoru, tj. max. 512 registrů na jednu bránu, a také velikostí FPGA. V praxi není velké množství registrů potřeba.
Komunikace přes dvouportovou paměť výrazně šetří zdroje FPGA. Modul obsahuje dvě brány, jednu směrem k CPUI a druhou směrem k uživatelské aplikaci. Velikost portu REGS je závislá na počtu registrů daných parametrem NumOfRegs, tj. obsahuje NumOfRegs × 32 bitů. Komunikace s dvouportovou pamětí je v obou směrech 32bitová. Modul umožňuje oddělení taktové domény procesoru (taktový signál mem_clk) a aplikace, resp. její části (taktový signál user_clk).
Na plesiochronní signály přijímané z E1 je nutno nejprve „zavěsit“ zdroj regenerovaných hodin, který řídí vnitřní procesy a vysílač obvodu Framer, FALC56. Tento obvod je výsledkem dlouhého vývoje firem Siemens (pak Infineon, Lantiq a nyní Intel).
Ladění lokálního oscilátoru u různých systémů se provádí buď digitálním fázovým závěsem (DPLL), nebo programovatelnou děličkou provedenou v PLD, závěsem přes zpoždění (delay-locked loop) pomocí „pullable“ (jemně laditelného) krystalu paralelně připojeným varikapem, jehož proměnná kapacita zatěžuje výbrus, anebo pomocí analogového PLL pomocí napětím řízeného krystalového oscilátoru (VCXO). V průběhu 25 let vývoje telekomunikačních aplikací jsme je vyzkoušeli všechny.
Obvod FALC56 potřebuje jen přesný a stabilní zdroj kmitočtu, např. 20 MHz, a pomocí programovatelné děličky racionálním číslem si vytváří signál RRCLK (received route clock). Obvod Xilinx si může multiplexerem vybírat tyto signály od různých rozhraní a tím určit Mastera hodin.
Nesynchronně měnící se signály je na vstupu FPGA ještě nutno převzorkovat řadou několika klopných obvodů D, které klopí na hranu taktovacího signálu vnitřní domény FPGA. Aby byl dodržen setup- a hold-time (předstih a přesah stabilní úrovně signálu oproti taktu), je nutno použít alespoň dva vzorkovací obvody D za sebou.
Rozhraní datové sběrnice obvodu FALC56 vede do FPGA – to kvůli rychlosti, protože sběrnice procesoru je rychlá a nemá vstup READY na prodloužení cyklu sběrnice. FPGA simuluje řídicí signály datové multiplexované sběrnice AD (Intel).
Výše popsaný systém bran jako rozhraní procesoru byl vyvinut za použití jazyka VHDL. Pro použití ve vyšší sestavě jsou nutné tři soubory. Soubor CPUI.VHD implementuje modul CPUI, soubor MEM_BLOK_32_32.VHD implementuje modul mem/regs a v souboru CPU_INT_LIB.VHD jsou definovány potřebné datové typy a konstanty. V souboru APP_TOP.VHD je uveden příklad použití modulů CPUI a MEM/REGS. Projekt je uložen ve složce CPU_INTERFACE.
Na tyto bloky pak zpravidla navazuje samotná logická struktura realizovaná mocnými prostředky použitého obvodu FPGA (desetitisíce hradel a klopných obvodů). V naší aplikaci je to člen rodiny Spartan. Obvodem je možno realizovat velmi složité stavové automaty, řadiče, komunikační obvody, specializované procesory nebo vstupní či výstupní obvody, které navazují procesor na okolní prostředí. V jedné naší aplikaci je to například řada PWM výstupních portů (převodníků číslo–střída) pro výkonové řízení spínanými regulátory.
V této aplikaci byly napsány automaty vybírající z přijatých dat E1 rámce dle ITU-T V.110 a konstruující rámce V.110 do kanálů vysílaného směru E1. Vlastně jde o dva specializované procesory pro jednu E1 připravující data V.24 do/z portů CPUI. Tak se podařilo realizovat multikanálový obousměrný terminálový adaptér V.24 / V.110, který nejen nahradil nedostupné obvody Infineon ITAC, ISDN Terminal Adapter Circuit, ale jejich výkon řádově předčil.
Spolupráce CPU a FPGA tohoto typu se ukázala tak úspěšnou, dobře programovatelnou a odladitelnou, že jsme tento koncept převzali do dalších konstrukcí a dále jsme ho „recyklovali“ do malého modulu vestavného mikropočítače s názvem Combi. Výrobce procesoru Atmel dále přišel s modernizovaným obvodem AT91SAMG20 s taktem 400 MHz a vylepšeným instrukčním souborem, a navíc je k dispozici nové vydání operačního souboru RT-Linux podporující periferie jako USB, ethernet, čítače a PCM na čipu. Modul Combi-G20 velikosti vizitky se stal základem nejen inovací jednotky NAG, ale i nových konstrukcí.
Na jedné malé desce vícevrstvého plošného spoje je kompletní mikropočítač s jádrem ARM9 na 400 MHz, paměťmi a podpůrnými obvody, propojený 32bitovou sběrnicí s obvodem FPGA. Na vnější konektor modulu jsou vyvedeny periferní signály a sériová rozhraní (UARTy, SPI, I2C) s příslušnými selekt-signály, analogové vstupy a další užitečné signály, zatímco na opačnou stranu desky jsou vyvedeny periferní I/O signály z FPGA.
To přináší překvapivé možnosti kombinace velmi rychlých a složitých logických struktur v FPGA, doplňovaných o softwarovou podporu z procesoru.
Blokové schéma embedded modulu Combi-G20 je na obr. 3.
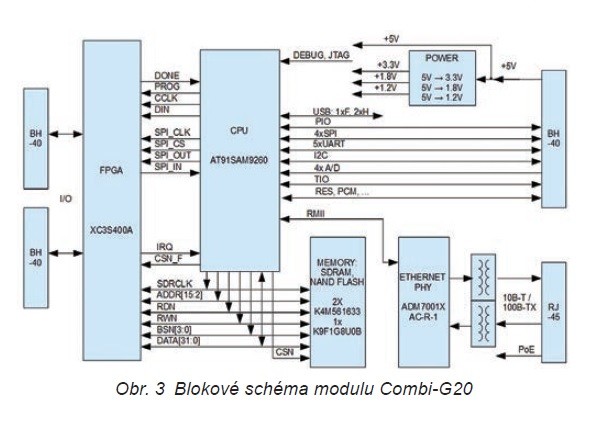
Podoba obr. 3 a obr. 2 je zřejmá. Liší se okrajovým propojením. V modulu Combi jsou signály procesoru a FPGA vyvedeny na dutinky konektoru BH-40 obráceného „dospodu“, takže modul Combi je možno nasunout na 40špičkové konektory − „hřebínky“ zapájené v základní nosné desce. Tyto konektory mají vývody v rastru 100 mils, což usnadňuje vývoj základní desky.
Rozhraní ethernet je vyvedeno na konektor RJ-45 a je též připraveno pro možné dálkové napájení PoE přes DC/DC převodník. Rozhraní USB Function je vyvedeno na konektor USB B (+5 V z kabelu je možno využít pro napájení modulu) a rozhraní 2× Host je připraveno na hřebínkovém konektoru pro plochý kabel, stejně jak se to dělá v PC. Konektory USB B a RJ-45 jsou umístěny na kraji modulu, aby je bylo možno prostrčit výřezem v krytu vestavného systému.
Uvedené programové i hardwarové moduly byly prakticky vyzkoušeny již v několika aplikacích. Jednou z nich je zpracování telekomunikačního rozhraní E1, kde ve 30B kanálech probíhá duplexní komunikace podle V.110. Zjednodušeně je činnost tato: Jestliže přijde platný blok dat, je uložen v příslušném bloku dvouportové paměti a FPGA vygeneruje do fronty zprávu procesoru o této události a aktivuje žádost o přerušení. Procesor v obslužné rutině přečte zprávu, tím shodí žádost o přerušení, vyčte data a uloží je do struktury v paměti pro zpracování vyššími vrstvami protokolového zásobníku. Tato rutina je velice rychlá, protože je to jen jednoduchý přenos bloku paměti plus ošetření přerušení, a proto nehrozí přetečení zásobníku.
Pokud se komunikuje s více rozhraními E1, je možno vybrat řídicí rozhraní z hlediska časování. Ostatní E1 musejí použít pružný rámcový buffer v obvodu FALC. Pokud řídicí rozhraní postihne výpadek, systém běží volně až do zvolení náhradního zdroje časování. Převzorkování a synchronizace umožní hladké přepnutí na jiný zdroj.
Vyšší vrstvy protokolu už pracují ve víceúlohovém režimu podle toho, jak jim systém přiděluje prostředky.
V opačném směru komunikace je činnost podobná: Když proces získá data pro odeslání, uloží je do příslušných míst sdílené paměti a nastaví v registru bit „vyšli“. Po odeslání je vygenerována zpráva a žádost o přerušení do procesoru, který doplní data do příslušné dvouportové paměti, aby se mohlo vysílat bez přestávek.
Další aplikací je například řízení polohy systému (robota) poháněného servomotorem. Poloha je odměřována dvojicí kvadraturních (postupně zatmívaných) signálů, z nichž jsou dekódovány impulsy UP/DN pro 32bitový obousměrný čítač polohy, který je v FPGA. Procesor tento čítač může kdykoli přečíst přes jeho dvouportovou paměť (zde opět jde o dva nesynchronní procesy, které synchronizuje odpamatovávací- vzorkovací obvod registru polohy). Procesor tak jediným atomickým čtením 32bitového registru získá platnou polohu. Další optický vstup funguje jako koncové čidlo, které definuje nulový stav (polohu).
Periodicky spouštěný řídicí program (pod RT Linuxem) si může časovou diferenciací polohy zjistit údaj o rychlosti a pomocí adaptivního modelu vypočíst pro žádaný pohyb hodnotu řídicí veličiny. Tou je výstup PWM nebo D/A převodníku do výkonového zesilovače, jímž je motor napájen. Vyšší vrstvy programového vybavení komunikují s nadřízeným systémem a rozkládají trajektorii složeného pohybu do elementárních pohybů, zatímco další proces porovnává realitu s chováním modelu a průběžně ho adaptuje. Předpokládá se přitom, že řízený systém je objektem s mnoha nelinearitami a vazbami (např. různá setrvačnost při různých ramenech).
Prakticky bylo ověřeno, že použití jediného přerušovacího signálu s navazujícím mechanismem bran ve dvouportové paměti je časově úsporné a spolehlivé (neztrácejí se žádosti o obsluhu ani „nevisí“ rozpracovaná obsluha události, a to ani ve velmi složitých situacích). Tento mechanismus je také velmi vhodný pro prostředí víceúlohového operačního systému s mnoha paralelními procesy, kterým Linux je.
Popsaná rozhraní mezi vstupy z reálného světa do FPGA i uvnitř něj, mezi FPGA a procesorem a synchronizace procesů v RT-Linuxovském prostředí jsou výsledkem snahy usnadnit praktické aplikace vestavného počítače se vším nabízeným komfortem pro práci v reálném čase.
Bylo vyřešeno zavěšení časové základny telekomunikačních obvodů na vstupní signály, implementováno synchronizované rozhraní vstupů/výstupů FPGA pro hladké přepnutí synchronizace a optimalizováno jádro operačního systému pro kompromisní soft-RT řízení procesů.
Základ systému byl „recyklován“ do embedded-modulu Combi-G20 obsahujícího vylepšený procesor, FPGA a podpůrné obvody. Dále byly vyvinuty hardwarové prostředky pro připojení modulu k ovládacím a snímacím obvodům pro běžné průmyslové řízení jako opticky oddělené nebo reléové či triakové vstupy/výstupy, PWM můstky, analogové I/O, rozhraní CAN nebo RS-485, přijímače a vysílače proudové smyčky 4−20 mA apod. Toto jádro opakovaně používáme v různých zakázkových systémech a snažíme se příznivé „vedlejší efekty“ tohoto spojení zúročit v neustále vylepšovaných projektech. Naštěstí jsme se, zdá se, „trefili“ do dlouhodobě podporovaného typu procesoru i logického obvodu, takže jsou pro ně dostupné aktualizace jak operačního systému, tak knihovních prvků i projektů třetích stran.

