

 Vítejte, dnes je
pátek
24.
duben
2026
Vítejte, dnes je
pátek
24.
duben
2026
Využití senzorů k určení polohy zařízení v prostoru sahá do počátků automatizace řízení – zejména v letectví, kosmonautice a vojenství. Automatizované systémy řízení např. letadla jsou založeny na tzv. inerciální měřicí jednotce obsahující různé senzory – gyroskopy, akcelerometry, magnetometry a v některých případech také tlakoměry. Tyto poměrně rozměrné senzory poskytují dílčí informace, jejichž fúzí (sloučením) lze získat informaci o poloze a orientaci zařízení v čase. Samotný výpočet je založen na využití Kalmánových filtrů ke zpracování nepřesné informace z jednotlivých senzorů.
Integrace elektromechanických prvků na jediném čipu (MEMS = Micro- -Electro-Mechanical Systems) s sebou přinesla miniaturizaci senzorů. Tyto senzory se pak objevily v mobilní elektronice a v současnosti je jimi vybaven každý tablet nebo smartphone. Určení polohy/ orientace těchto mobilních zařízení využívá řada aplikací – od jednoduchých her, kde orientace zařízení slouží k ovládání, až po asistovanou navigaci jako doplněk GPS zejména uvnitř budov. Senzorová fúze proto našla zcela nové uplatnění v oblasti, kde malé rozměry a nízká spotřeba jsou zcela zásadními požadavky.
Dosud používaná řešení senzorové fúze využívala k výpočtu hlavní aplikační procesor mobilního zařízení. Většinou nebylo dosaženo vyhovující přesnosti a vývojáři aplikací se nemohli dostatečně spolehnout na údaje o pohybu a orientaci. Řada řešení byla též vyladěna pouze pro senzory určitého výrobce. Použití senzorů jiného výrobce nebylo nemožné, bylo ale značně komplikované, protože ladění se muselo opakovat s každou novou generací zařízení.
Další nevýhodou byla nízká efektivita výpočtu senzorové fúze v aplikačním procesoru. Tyto procesory (např. Cortex M0 nebo M3) typicky nebývají optimalizovány na výpočet fúze a musí tedy tento nedostatek kompenzovat vyšší pracovní frekvencí za cenu vyšší spotřeby. Pro dosažení přesného sledování nebo přesné navigace ve vnitřních prostorách je nutné bránit se magnetickým anomáliím a též korigovat gyroskopické odchylky. Pro dostatečnou účinnost vyžadovaly senzor fusion algoritmy často více než 50% výkonu těchto univerzálních procesorů. Novější mobilní zařízení (např. iPHONE 5S) proto zpracování údajů ze senzorů delegují do dedikovaných senzorových hubů či koprocesorů, jako je např. EM7180 SENtral.
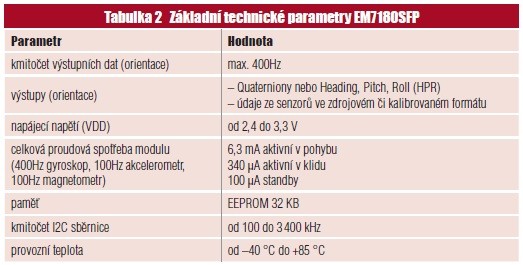
Integrovaný obvod EM7180 SENtral je koprocesor pro senzorovou fúzi a je primárně určen do mobilních zařízení. V nepřetržitém provozu zpracovává informace ze 3 MEMS senzorů: 3osého gyroskopu, 3osého akcelerometru a 3osého magnetometru. Taková soustava senzorů má celkem 9 dílčích vstupů a je proto označována jako 9 stupňů volnosti (9DOF = Degree Of Freedom), ze kterých vyhodnocuje výslednou polohu. Obvod EM7180 využívá vysoce sofistikovaný algoritmus pro zpracování dat, který automaticky vypíná nepotřebné senzory v době, kdy je zařízení v klidu a tím dále snižuje celkovou proudovou spotřebu. A EM7180 SENtral ji má skutečně velmi nízkou (viz tabulka 1) a v 16vývodovém pouzdře měří pouhých 1,6 × 1,6 mm (viz obr. 1).

.jpg)
Obr. 1 Obvod EM7180 SENtral (1,6 × 1,6 mm)
Kromě základní aplikace 9DOF podporuje EM7180 i redukované operační módy se 6 stupni volnosti (6DOF) pro typické kombinace gyroskop + akcelerometr nebo akcelerometr + magnetometr. Redukované módy 6DOF mají nižší přesnost, plně ale dostačují pro řadu aplikací.
EM7180 SENtral netrpí omezující těsnou vazbou výběru senzoru konkrétního výrobce na jeho algoritmus pro senzorovou fúzi. K obvodu lze připojit v podstatě jakýkoliv senzor od jakéhokoliv výrobce. Kromě pohybových senzorů to může být i teploměr, tlakoměr či vlhkoměr a obvod tak zastane funkci senzorového „hubu“. Data z ostatních senzorů nejsou součástí fúze, jsou pouze prezentována hostitelskému procesoru.
Protože byl koprocesor SENtral navržen speciálně pro senzorovou fúzi, zbavil v první řadě aplikační procesory jejich nepřiměřené zátěže, tím i energetické náročnosti celého řešení. Spotřeba aplikace EM7180SFP je například ve srovnání s procesorem Cortex M0 více než 100× nižší ve srovnání s typickým řešením popsaným v předcházející části. Obvod EM7180 SENtral rovněž umožňuje nepřetržitou autokalibraci, což znamená neustálé vyrovnávání magnetických anomálií a gyroskopických odchylek senzorů. Všechny tyto přednosti činí SENtral ideální součástkou pro senzor fusion aplikace v trvale zapnutých mobilních zařízeních.
Kompletní řešení na bázi obvodu EM7180 představuje modul EM7180SFP (Sensor Fusion Platform). Tato aplikace (viz obr. 2 a 3) obsahuje koprocesor EM7180 SENtral, 9DOF senzor Bosch BMX055 (gyroskop, akcelerometr, magnetometr) a konfigurační paměť EEPROM 32KB. Použitím modulu získá zákazník velmi přesnou polohovou informaci. Vysoká obnovovací frekvence umožňuje aplikaci na hostitelském procesoru poskytovat rychlé a přesné údaje, odolné vůči magnetickému rušení. Frekvenci jednotlivých výstupů lze konfigurovat ze strany hostitelského procesoru a dále tak optimalizovat spotřebu konkrétní aplikace.
.jpg)
Obr. 2 Modul EM7180SFP (1,02 × 1 cm)
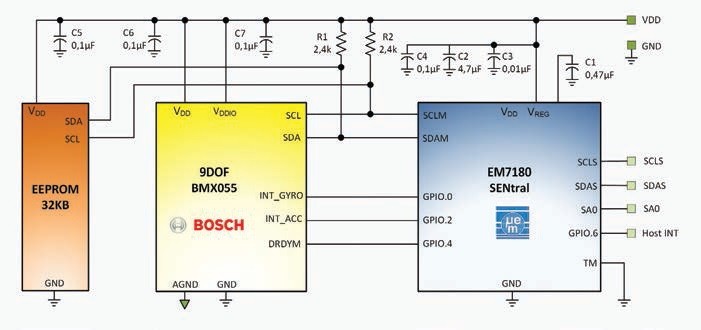
Obr. 3 Blokový diagram EM7180SFP Sensor Fusion Platform
Modul EM7180SFP lze rychle, snadno a s minimem inženýrského úsilí integrovat na desky plošných spojů do celé řady aplikací. Modul EM7180SFP měří 1,02 × 1 cm (viz obr. 2), má standardní rozteč vývodů pouzdra DIL a je ideální k prototypování. Cílovými produkty jsou nejrůznější mobilní zařízení, která vyžadují co nejmenší spotřebu energie a zároveň co nejvyšší přesnost měření. EM7180SFP získal ocenění redaktorů portálu Electronic Products za rok 2013.
Zcela nové produkty – obvod EM7180 i modul EM7180SFP jsou v době zveřejnění článku uváděny na trh a představovány klíčovým zákazníkům. V termínu redakční uzávěrky ještě nebyly známy všechny informace ani o termínech dostupnosti vzorků, ani o cenách obvodů a modulů. V případě zájmu kontaktujte firmu ASICentrum na e-mailové adrese sale@asicentrum.cz.

