

 Vítejte, dnes je
sobota 26.
duben
2025
Vítejte, dnes je
sobota 26.
duben
2025
Systémy pracující s elektrickými signály mívají spoustu podob. Mohou přitom zahrnovat různé součástky, včetně snímačů, akčních členů, zesilovačů, analogově-číslicových převodníků (ADC), číslicově-analogových převodníků (DAC) nebo snad i mikrokontrolérů. Klíčovou roli zde hraje přesnost celého signálového řetězce. Abychom ji dokázali navýšit, bude v prvé řadě nezbytné stanovit a minimalizovat dílčí chyby jednotlivých prvků. V závislosti na složitosti systému však může taková analýza vzbuzovat obavy. V článku si proto představíme přesný nástroj sloužící k výpočtu chyby signálového řetězce s D/A převodníkem. Popíšeme jednotlivé zdroje odchylek, pokud jde o součástky zapojené společně s DAC, a nakonec si krok za krokem ukážeme, jak zmíněný nástroj použít k rozpoznání a následné korekci těchto problémů.
Precizní nástroj pro výpočet chyby systému s DAC [1] je detailní, snadno se používá a může vývojářům pomoci s výběrem nejvhodnější součástky pro danou aplikaci. Protože se však D/A převodníky v rámci signálového řetězce zpravidla neobjevují samy, ale bývají místo toho připojeny k napěťovým referencím a operačním zesilovačům, např. na pozici bufferů pro referenci, je zapotřebí zvážit a započítat i tyto další součástky a jejich dílčí chyby. Abychom této představě lépe porozuměli, zaměříme se nejprve na jednotlivé „přispěvatele“ u hlavních součástek – viz také obr. 1.
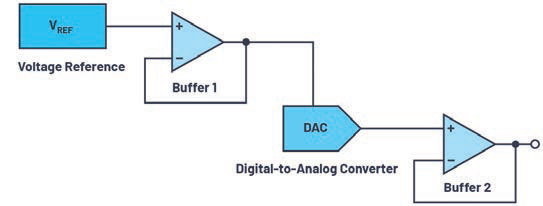
Obr. 1 Hlavní součásti signálového řetězce s D/A převodníkem
Napěťová reference bude mít čtyři stěžejní zdroje chyby. První je spojována s počáteční přesností (výchozí chyba) ukazující odchylku výstupního napětí tak, jak je měřena při testech ve výrobě a pro definovanou teplotu +25 °C. K tomu se pak přidávají nepřesnosti související s teplotním koeficientem a rovněž i reakcemi na změnu v zatížení (Load Regulation) či na vstupu (Line Regulation). K celkové chybě přispívají nejvíce počáteční odchylky a teplotní koeficient.
V případě operačních zesilovačů má největší vliv odchylka spojená se vstupním napěťovým offsetem a také tolerancemi rezistorů. Chyba vstupního napěťového offsetu zde přitom odkazuje na malé rozdílové napětí, které je nutné připojit ke vstupům, abychom si na výstupu vynutili 0 V. Tolerance rezistorů se zase dotýká chyby v zesílení způsobené příslušnými odchylkami při nastavení zisku v uzavřené smyčce. Za dalšími nepřesnostmi pak stojí klidový proud, činitel PSRR (Power Supply Rejection Ratio), zesílení otevřené smyčky, vstupní proudový offset, offset CMRR a ujíždění vstupního napěťového offsetu.
U D/A převodníku samotného definuje různé druhy odchylek datasheet. Jedná se například o integrální nelinearitu (INL) související s rozdílem mezi ideálním výstupním napětím a výstupem měřeným za předpokladu daného vstupního kódu. Zapomenout nesmíme ani na zesílení, offset a teplotní koeficient u zisku. Všechny se pak někdy slučují dohromady a dávají tím vzniknout chybě TUE, tedy Total Unexpected Error. Ta se dotýká měření chyby výstupu za předpokladu všech odchylek DAC, tzn. u INL, offsetu a zisku, stejně jako v případě výstupního driftu odrážejícího změny v napájecím napětí a s teplotou.
Protože spolu různé zdroje odchylek zpravidla nemusí souviset, výslednou chybu v signálovém řetězci nejpřesněji stanovíme po odmocnění součtu kvadrátů:

Dát dohromady chyby jednotlivých součástek bývá často považováno za nevděčnou práci. Pojďme si tedy vše zjednodušit díky speciálnímu nástroji sloužícímu k přesným výpočtům.
Začneme výběrem jednoho ze tří typů D/A převodníku (Voltage Output DAC, Multiplying DAC nebo 4–20 mA Current Source DAC). Dále pro účely výpočtu chyby stanovíme požadovaný teplotní rozsah a zvlnění napájecího napětí. Posledně uvedené pak bude rozhodující v případě činitele PSRR. Jakmile máme hodnoty zadané, nástroj vykreslí diagram zachycující u příslušných součástek signálového řetězce rozdělení příslušných zdrojů chyby, přesně jako to vidíme na obr. 2.
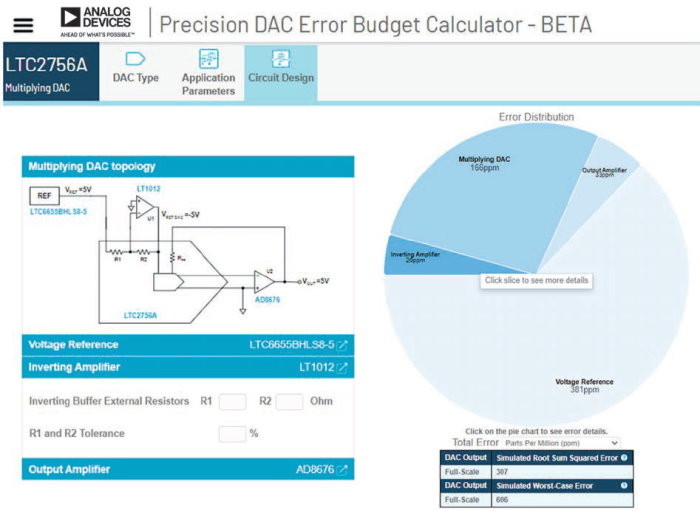
Obr. 2 Znázornění dílčích odchylek v nástroji pro výpočet chyby od ADI
Celková chyba je v našem případě do značné míry ovlivněna napěťovou referencí. Lepších výsledků pak bude možné dosáhnout díky přesnějšímu modulu reference.
Rezistory integrované v rámci D/A převodníku související s vlastním invertujícím zesilovačem, a tudíž i dalším zvyšováním přesnosti hrají v případě celkové chyby DAC klíčovou roli. Pro D/A převodníky bez interních rezistorů či invertujícího zesilovače lze tyto parametry definovat samostatně – viz obr. 2.
Nástroj pro výpočet chyby v systémech s D/A převodníky je spolehlivý a snadno se používá. Precizní signálový řetězec lze proto navrhnout pohodlněji a rychle přitom zhodnotit kompromisy spojené s daným řešením.
Odkazy:
[1] Error Budget Calculator, https://beta-tools.analog.com/DACErrorBudget/














