

 Vítejte, dnes je
sobota 26.
duben
2025
Vítejte, dnes je
sobota 26.
duben
2025
Během posledních 20 let vznikl nový obor inteligentních dopravních systémů (ITS – Intelligent Transportation Systems) zaměřený na pozemní dopravu. Stalo se tak postupně jak v Severní Americe, tak i v Evropě, Japonsku, Jižní Koreji, Austrálii a v dalších zemích. ITS je ve své podstatě založený na informačních a komunikačních technikách (ICT – Information & Communication Technologies). Známé instituce, jako jsou např. IEEE a SAE, uznaly ITS a jeho dílčí kategorie již před mnoha lety. Dvě nové dílčí kategorie, které vznikly v posledních 10 letech, jsou autonomní nebo také automatizovaná vozidla (AV), známé také pod názvy self-driving cars, driverless cars nebo robocars, u nás potom např. vozidla bez řidiče, a propojená autonomní vozidla (CAV – Connected Autonomous Vehicles). Oba dva pojmy se dostaly v poslední době do povědomí díky úsilí společnosti Google, která se ve vyvinutí potřebné technologie značně angažuje. Tak jako i v jiných případech vývoje pokročilé techniky má zájem o automatizované dopravní prostředky svůj původ ve vojenském sektoru. V tomto případě byly výzvy definované v „DARPA Grand Challenges“ [1] hlavním podnětem pro Google a ostatní zájemce o automatizovaná vozidla k tomu, aby se zapojili do vývoje potřebné techniky. Dnes se může Google pochlubit flotilou automatizovaných vozidel, které ujely bez lidského zásahu do řízení více než 1 milion km, a to bez nehod, což je vskutku pozoruhodný výsledek dosažený v tak krátkém časovém období.
Zatímco původní testování automatizovaných vozidel probíhalo z bezpečnostních důvodů v neobydlených oblastech, použitá technika se natolik vylepšila, že již 4 státy USA zlegalizovaly testování těchto vozidel na veřejných silnicích. Jsou to Kalifornie, Nevada, Arizona a Michigan. Velká Británie zvažuje jejich povolení na veřejných silnicích od roku 2015. V současnosti musí být v těchto vozidlech po dobu jízdy na veřejných cestách přítomen řidič, který má možnost v případě nutnosti vypnout automatizované řízení.
Autonomní řízení vozidla tak, jak bylo vyvinuto společností Google, je možné s pomocí různých senzorů a řídicích systémů namontovaných na vozidle. Videokamery, radary a lasery umožňují vozidlu získat přehled o situaci kolem vozidla v plném rozsahu 360° a detekovat blízké objekty (obr. 1). Tyto systémy jsou doplněny o přesné zaměření GPS, detailní mapy z dílny Google Maps, informace o počasí atd. Všechna data získaná v reálném čase jsou zpracována v autonomním řídicím softwaru, který je založen na komplexních algoritmech a umělé inteligenci a který rozhoduje o řízení a ovládání různých funkcí vozidla. Jeden ze senzorů na vozidle od Google SDC (Self Driving Car) je LiDAR [2], prostorový snímač umístěný na střeše vozidla, který se otáčí rychlostí cca 1 000 ot./min. Tento pokročilý radar používající laser zajišťuje přesné prostorové mapování okolí vozidla až do vzdálenosti 100 metrů. Na obr. 2 je vidět vizualizace 3D mapy zhotovené tímto zařízením. Google vozidla používají LiDAR s 64 lasery (model HDL-64), který v Kalifornii vyrábí firma Velodyne [3]. Jeho cena je přibližně 1,4 miliónu Kč.

Obr. 1 Autonomní vozidlo Google s rotačním snímačem LiDAR na střeše pro vytvoření 3D mapy okolí, třemi radary vpředu a jedním vzadu. U zpětného zrcátka je video kamera k rozpoznání dopravních značek, chodců i cyklistů, na levém zadním kole je přesný snímač pohybu pro navigaci v mapě.
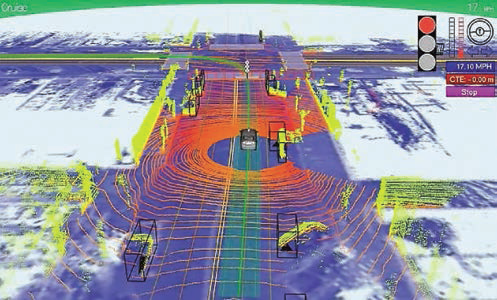
Obr. 2 Jak vozidlo „vidí“ své okolí – vizualizace 3D mapy vytvořené LiDARem
Kromě společnosti Google jsou ve vývoji autonomních vozidel aktivní i jiné firmy, například BMW, Toyota, VW, Tesla, Mercedes Benz, Audi, Volvo a další. I tyto firmy mají stejnou koncepci – použití celé řady senzorů ke snímání prostředí kolem vozidla v reálném čase a zpracování těchto informací ke generování pokynů pro řízení vozidla (ovládání volantu, světelná signalizace změny trasy, akcelerace či zastavení vozidla).
Nejvíce práce na vývoji těchto vozidel se zatím udělalo v USA. Kvůli zvýšenému zájmu o autonomní vozidla ze strany různých úřadů v USA vypracoval orgán zodpovědný za bezpečnost vozidel (National Highway Traffic Safety Administration – NHTSA) [4] nedávno směrnici, která definuje různé úrovně automatizace vozidel takto:
– Úroveň 0: Řidič kompletně ovládá vozidlo po celou dobu jízdy.
– Úroveň 1: Jednotlivé ovládací funkce vozidla jsou automatizovány, např. elektronický stabilizátor jízdy (EDS) nebo brzdění (ABS).
– Úroveň 2: Nejméně dva druhy ovládání vzájemně se doplňující jsou automatizovány, např. automatické udržování rychlosti v kombinaci s dodržením jízdy v jízdním pruhu.
– Úroveň 3: Řidič se může za určitých podmínek vzdát ovládání všech kritických funkcí. Vozidlo rozpozná, kdy řidič musí opět převzít řízení vozidla a zajistí k převzetí řízení dostatečně dlouhou dobu.
– Úroveň 4: Vozidlo vykonává všechny kritické funkce po celou dobu jízdy samo, přičemž se vůbec neočekává zásah řidiče. Protože takové vozidlo ovládá všechny funkce od nastartování až po zastavení, včetně všech úkonů potřebných při parkování, může být i bez pasažérů.
Vozidlo bez řidiče v pravém slova smyslu tedy spadá do kategorie Úroveň 4.
Další vývoj autonomních vozidel bude pravděpodobně evoluční místo revoluční. Předtím, než se stanou hlavními dopravními prostředky, budou muset překonat ještě mnoho překážek. Tak např. budou muset být zavedeny nové právní úpravy a předpisy, které budou definovat pravidla pro jízdu autonomních vozidel po veřejných komunikacích, kde se budou současně pohybovat také jiní účastníci provozu – např. kola, motocykly, tramvaje, ale také chodci. Také musí být dopředu vyřešena otázka odpovědnosti za škody či problematika pojištění. V tuto chvíli je vývoj techniky poměrně dost napřed oproti přípravám potřebných právních předpisů, což může způsobit zdržení při zavádění těchto vozidel do praxe. Hlavním argumentem pro praktické rozšíření automatizovaných vozidel je bezpečnost. V USA zemře ročně při automobilových nehodách asi 32 tisíc lidí, celosvětově se pak odhady pohybují kolem 1,2 miliónů osob. Mnohem více lidí je však zraněno, mnohdy s doživotními následky, což přináší další značné finanční náklady. Automatizovaná vozidla také nabízí vizi účinného dopravního systému s omezenými dopady na životní prostředí a s nižší spotřebou paliva. Známé společnosti, jako jsou Morgan Stanley, Rand Corporation, KPMG a IHS, vypracovaly podrobné analýzy, které dokládají finanční výhody zavedení automatizovaných vozidel do běžné praxe. Například firma Morgan Stanley odhaduje pozitivní dopad na americkou ekonomiku v částce 26 biliónů Kč ročně. Celosvětově pak tento benefit může dosáhnout hodnoty až 112 biliónů Kč (za předpokladu, že bude celý dopravní systém založen na používání autonomních vozidel). Detailní informace lze získat z analýzy Morgan Stanley [5].
Autonomní (automatizovaná) vozidlajsou považována za fenomén, který může způsobit jisté problémy (disruptive technology), protože vyvede z rovnováhy mnoho existujících modelů v podnikání s dopravními prostředky. Níže jsou podrobněji uvedeny některé z nich.
Některá povolání, která souvisí přímo s řízením vozidel, např. řidiči taxi, autobusů či nákladních automobilů, mohouse zavedením autonomních vozidel zcela zaniknout. Na druhé straně vzniknou nové pracovní příležitosti, např. specialisténa vývoj komponentů pro tato nová vozidla nebo jejich údržbu a opravy. Pokud se potvrdí prognózy o rostoucím sdílení automobilů, ovlivní to také výrazně jejich výrobce, protože se bude vyrábět méně aut.
Velké části měst dnes zabírají parkovací plochy. Např. v Calgary v Kanadě se odhaduje, že až 30 % využitelné plochy ve středu města je zabráno pro účely parkování. Autonomní vozidla budou mít schopnost samočinného zaparkování mimo důležité části města, čímž uvolní tato místa pro smysluplnější účely. Provozovateléplacených parkovišť v centrech měst tak přijdou o značnou část svých tržeb, protože po jejich službách už nebude taková poptávka.
Vybudovat a provozovat veřejnou dopravu je velmi drahé. Tak např. vybudování nové tramvajové linky „West LRT“ v Calgary stálo okolo 32 miliard Kč, přičemž je dlouhá pouze 8 km a má 6 zastávek. Podobně náklady na zakoupení nového městského autobusu jsou kolem 10 miliónů Kč a roční náklady na jeho provoz jsou asi 3 milióny Kč. Veřejná doprava je finančně neefektivní zejména v oblastech s malým počtem obyvatel. Autonomní vozidla mohou v těchto situacích nahradit klasickou dopravu, když vyzvednou pasažéra doma a dovezou ho k centrálnímu nádraží, odkud bude mít další spojení. Tím se veřejná doprava stane skutečně hromadnou, přičemž tato přeprava velkého počtu lidí s vynaložením rozumných finančních prostředků bude mít pozitivní přínos i pro životní prostředí.
Používání autonomních vozidel bude mít obrovský vliv také na územní plánování a využití pozemků ve městech. Bude potřeba méně silnic a dálnic, parkovacích ploch i základní infrastruktury dopravy. Uvolněné půdní zdroje se pak mohou využít pro obytnou zástavbu, parky a průmysl.
Jednou z velkých výhod autonomních vozidel bude možnost pro starší a zdravotně postižené osoby cestovat bez nutnosti být odkázán na pomoc druhých. Autonomní vozidlo tak může např. seniora vyzvednout doma a dovézt ho k lékaři nebo na nákup. Podobně lidé nevidomí nebo jinak postižení, kteří sami nemohou řídit auto, budou mít snadnější přístup k dopravě. Děti budou moci cestovat i bez rodičů či jiného dospělého dozoru.
Předpokládá se, že používání autonomních vozidel podstatně sníží počet nehod způsobených lidskou chybou nebo nepozorností tak, jak je známe u současných automobilů. Autonomní vozidlo nebude nikdy unaveno a bude reagovat na informace v dané chvíli mnohem rychleji než mohou lidé. Tato vozidla nebudou samovolně porušovat dopravní předpisy, jako je např. maximální povolená rychlost. Výrazně nižší počet usmrcených a zraněných osob sníží náklady na zdravotní péči v případě hospitalizace a dlouhodobého léčení. Další oblastí lidského života, na kterou bude mít používání autonomních vozidel vliv, je obor transplantace lidských orgánů. Na jedné straně bude nižší počet pacientů čekajících na transplantaci, na druhé straně však také ubyde počet možných dárců.
Ahmad Radmanesh, Ph.D., P. Eng. je profesorem na univerzitě v Calgary a také členem týmu CAVCOE (Canadian Automated Vehicles Centre od Excellence) [6]. V současnosti je jeho výzkum zaměřen na autonomní a komunikující vozidla a jejich podpůrnou infrastrukturu. Významně se podílel na vytvoření městského dopravního centra v Calgary. Studoval elektrotechniku na univerzitě v anglickém Leedsu a titul Ph.D. v oboru Control Systems Engineering získal na univerzitě v Sheffieldu.
Literatura:
[1] DARPA Grand Challenges (http://archive.darpa.mil/grandchallenge)
[2] LiDAR (http://en.wikipedia.org/wiki/Lidar)
[3] Velodyne (www.velodynelidar.com/lidar/lidar.aspx)
[4] NHTSA – National Highway Traffic Safety Administration (http://www.nhtsa.gov)
[5] https://docs.google.com/file/d/0B3dRtKk7uyOqUUZJOEVyX3dp-Q1E/edit?pli=1
[6] CAVCOE – Canadian Automated Vehicles Centre of Excellence (www.cavcoe.com)














