

 Vítejte, dnes je
pátek
13.
březen
2026
Vítejte, dnes je
pátek
13.
březen
2026
Článek přináší vybraný přehled výpočtů a také simulací, které se budou v precizních systémech vztahovat ke vstupu. Ukazuje rovněž, jak díky nim získat co nejvíc.
Při návrhu signálového řetězce pro analogová měření je zapotřebí spočítat odchylky i rušení, kterými zde přispívají různé prvky, a následně je použít při stanovení špičkových parametrů. Specifikace lze vyjádřit poměrem jako procenta, příp. je vztáhnout k výstupu či vstupu, budou-li v lineárních jednotkách. S výpočty vztaženými ke vstupu se obvykle pojí nejvíce nejasností. Z pohledu systémových vlastností však přináší důležité informace.
Rušení a odchylky vztažené ke vstupu
Pokud jde o měření, sledujeme na obr. 1 obecný blokový diagram takového systému. Pro zajištění měřicích funkcí může každý blok obsahovat i větší počet součástek nebo stupňů. Všechny analogové stupně, od senzoru přes A/D převodník, zde v analogové rovině zároveň vnáší nežádoucí rušení (šum) a odchylky (chybu), které maskují hodnotu měřeného signálu. Data na výstupu A/D převodníku již tedy budou užitečným signálem v kombinaci s celkovým rušením a také chybou. Rušení a odchylku lze do určité míry potlačit na základě kalibrace, kompenzace nebo i postupů při zpracování signálu. To, co nám zůstane, již ale představuje nejistou skutečnou hodnotu měřené veličiny. V případě měřicího přístroje pak analýza neurčitosti pomůže stanovit klíčové specifikace systému, pokud jde o přesnost, resp. preciznost [1], [2].
Pokud rušení a odchylky signálového řetězce vztáhneme ke vstupu, dokážeme rovnou srovnávat se vstupním signálem. Porozumíme tak celkovým vlastnostem měřicího systému, které se odvíjí od známých požadavků a také charakteristik signálu. Výpočet celkového rušení vztaženého ke vstupu (referred to input, RTI) kupříkladu vrhne světlo na nejmenší vstupní signál, který lze ještě odlišit od šumu. Další způsob, jak uvažovat o výpočtech vztažených ke vstupu, odráží skutečnost, že data měřená A/D převodníkem jsou často softwarově odstupňována, takže reprezentují hodnotu měřené fyzikální veličiny. Původní data již obsahují chybu a také rušení, takže jejich odstupňovaná podoba bude mít stejné relativní zastoupení odchylky i šumu, nicméně zde máme měřítko a vše vypadá, jakoby se to vyskytovalo na vstupu společně se signálem.
Obr. 1 Blokový diagram obecného měřicího systému
Kombinace zdrojů rušení. RTI a RTO
Pro účely výpočtu celkového rušení je zapotřebí vztáhnout zdroje šumu ke stejnému místu dříve, než budou sloučeny. Pravda, rušení lze vztahovat i k ostatním bodům v signálovém řetězci, ale výpočet šumu ve smyslu RTI a RTO (referred to output) patří při stanovení systémových parametrů k těm nejužitečnějším. Vývojář si přitom zvolí, které místo v zapojení nazve vstupem či výstupem a jaké jednotky přitom použije. Vstup může být např. fyzikální veličinou, jako je teplota ve °C a šum RTI pak počítáme ve °C. Rušení lze vztáhnout ke vstupu signálového řetězce rovněž v elektrických jednotkách, jako jsou volty či ampéry. Podobně můžeme i výstup definovat jako data vycházející z A/D převodníku, pokud jde o nejméně významné bity, ekvivalent voltů či napětí na vstupu A/D převodníku.
Zdroj rušení RTI je virtuálním zdrojem šumu situovaným na vstupu, který při měření přispívá stejným rušením jako skutečný zdroj šumu. Hodnotu každého zdroje rušení RTI stanovíme, pokud skutečný zdroj rušení dělíme zesílením od vstupu až k tomuto místu. Společně se přidává i spektrální výkonová hustota šumu zdrojů rušení RTI, abychom tak určili rušivé spektrum celého systému. Podobně bude i zdroj rušení RTO virtuálním zdrojem šumu na výstupu. V případě rušení RTO se každý zdroj šumu násobí ziskem až k výstupu a v tomto místě se rovněž spojí. Jestliže za definovaným výstupem již nemáme žádné zdroje rušení, odpovídá rušení RTO šumu, který naměříme na výstupu.
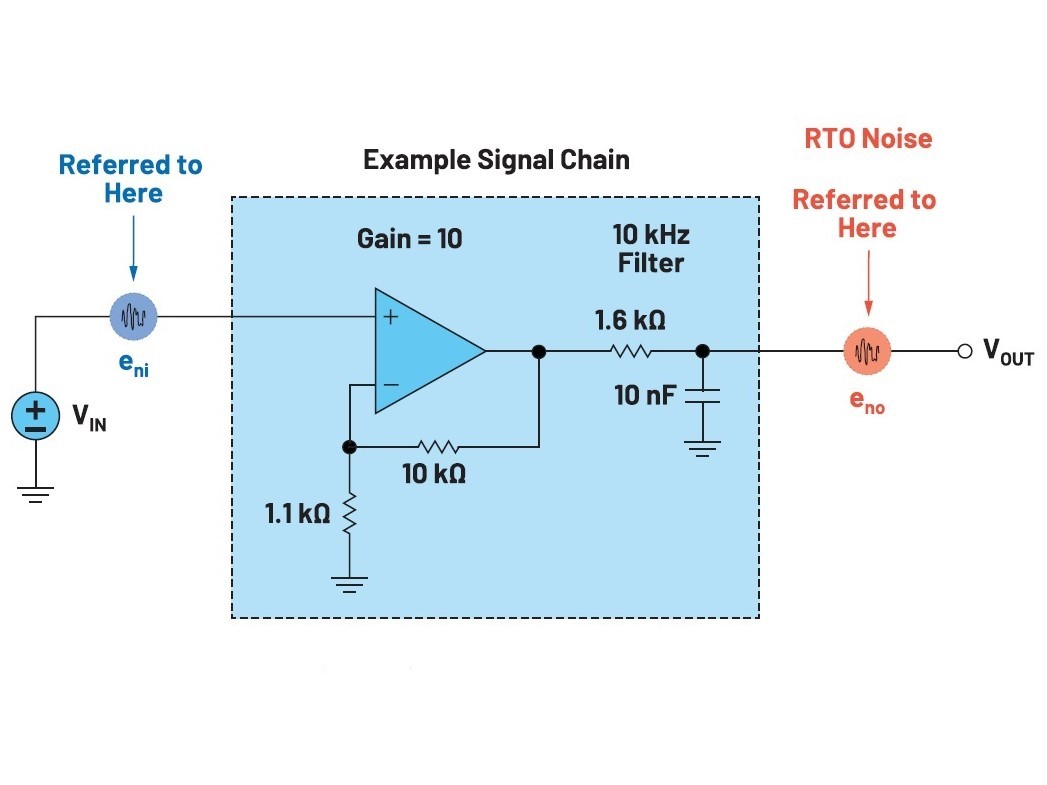
Obr. 2 Příklad RTI a RTO
Na obr. 2 vidíme model šumu RTI a RTO v případě jednoduchého signálového řetězce složeného z neinvertujícího zesilovacího stupně a dolnopropustného filtru. Protože signál postupuje ze vstupu na výstup, existuje mezi nimi nerovnováha. Šum RTO nám ukazuje rušení poté, co se šířilo celým signálovým řetězcem, a odpovídá při měření celkovému šumu. Rušení RTI naproti tomu postihuje šum pocházející z počátečních stupňů, který ještě nebyl pásmově omezen bloky, které v signálovém řetězci teprve následují. Rušení vně pásma, které se v signálovém řetězci odfiltruje, měřenou hodnotu nakonec neovlivní. Ve spektru šumu RTI se však projeví. Technicky to není problém a ani to neznamená, že rušení RTI je špatně. Šum RTI lze vynásobit zesílením s přihlédnutím ke kmitočtové charakteristice signálového řetězce, takže obdržíme rušení RTO a žádná informace nebude ztracena. Smyslem výpočtu šumu RTI je každopádně srovnání rušení se signálem na vstupu. Pokud zahrneme rušení vně pásma, které nám neovlivňuje měření, tato tradiční definice RTI nám ale srovnání celkového jednotného šumu oproti vstupnímu signálu příliš neusnadňuje.
Jiná definice prozradí vývojáři víc
Výstupní signál je možné srovnávat s rušením RTO přímo, protože bere v potaz celý signálový řetězec. Otázkou se tedy stává, zda lze šum RTI definovat způsobem, který umožní se signálem na vstupu snadné porovnání. Odpověď odráží skutečný způsob využití měřených dat. Na rušení RTO aplikujte stejné měřítko, které bude software používat pro výstupní data, aby mohla reprezentovat vstupní signál. Pokud jde o vstup, obojí lze spočítat stejným způsobem. Jinými slovy výstupní rušení budeme dělit zesílením signálu.
Další otázkou ale je, jak máme definovat zesílení signálu. Bez ohledu na stejnosměrnou či střídavou vazbu bude zisk použitý v případě signálu u většiny obvyklých lineárních zapojení vyrovnaný pro určitou šířku pásma, která nás v návrhu také zajímá. Zmíněnou šířku pásma pak označujeme jako signálové pásmo. Signál nese v takové oblasti hodnotnou informaci, kterou je zapotřebí zachytit. Šířka pásma obvodu pro pokles o -3 dB je přitom navržena tak, aby převyšovala pásmo signálu s cílem zamezit dynamickým odchylkám signálu na okraji pásma. Pokud ale od restrikcí odhlédneme, bude šířka pásma většinou limitována maximální možnou měrou, abychom tak potlačili rušení.
Jestliže tedy máme zesílení signálu definováno jako zisk v rámci signálového pásma a taková konstantní hodnota se použije k převodu rušení RTO na RTI, začne nám rušení RTI dávat ještě větší smysl. Rozdíl mezi oběma modely plyne z obr. 3. U alternativního modelu rušení RTI znázorňuje šum, který ovlivňuje měření signálu, a to včetně složek vně pásma. Simulované rozdíly mezi dvěma metodami RTI pak vidíme na obr. 4.
Obr. 3 Model s upraveným RTI
Obr. 4 Výsledky simulace rušení v případě obou metod RTI
Průběhy vstupního šumu jsou v případě nízkých kmitočtů shodné. S poklesem zisku se ale začínají rozcházet. Pokud se tedy máme dopátrat celkového rušení, nelze začlenit tradiční šum RTI, kdežto virtuální rušení RTI integrovat lze. K převodu mezi virtuálním rušením RTI a rušením RTO je možné použít zesílení signálu, a to v případě obou hodnot – jednotného šumu a také spektrální hustoty šumu.
Pokud ale nemáme v rámci signálového pásma vyrovnané zesílení, lze uvažovat o přizpůsobení pásma signálu nebo modifikaci zapojení tak, že bude mít šířku pásma větší. Můžeme se tím vyhnout horším vlastnostem signálu na okraji signálového pásma. Jestliže to ale není možné, dosáhneme sladění obecného případu a softwarového činitele pro převod s největší pravděpodobností na základě nominálního zesílení pro signálové pásmo. Ujistěte se však, že máte vyhodnocenou odchylku a také odstup užitečného signálu od šumu na okraji signálového pásma, takže nevybočují z definovaných požadavků.
RTI a výpočty v LTspice®
Pro účely simulace šumu se bude skvěle hodit univerzálnost a také přesnost nástroje LTspice® [3]. V rámci příkazu pro simulaci rušení máme stanoven výstupní uzel a také vstupní zdroj, přičemž výstupní šum (RTO) znamená běžný způsob, jak zobrazit výsledky analýzy. LTspice rovněž spočítá vstupní šum vztažený dle tradiční definice RTI na vstupu ke konkrétnímu zdroji, ale jak jsme viděli na obr. 4, integrace tradičního šumu RTI nezajistí užitečný výsledek. Obr. 5 proto ukazuje, jak na výstupu LTspice přidat stupeň, takže simulátor vrací alternativní – virtuální rušení RTI. Poté, co se zvoleným diagramem proběhne simulace, přidejte vstupní šum z „Plot Settings - Add Trace“ a dále vyberte „V(inoise)“. Do diagramu se tak dostane vstupní rušení. Křivka a její průběh odpovídá výstupnímu šumu, což signalizuje, že je počítáno s kmitočtovou odezvou celého zapojení. Stiskněte CTRL a kliknutím levým tlačítkem na trasu označenou v grafu jako „V(inoise)“ začleníte celkový šum RTI.
Obr. 5 Způsob zapojení v LTspice za účelem simulace virtuálního šumu RTI
Analýza rušení signálového řetězce s webovým nástrojem
Jako součást sady webových nástrojů ADI Precision Studio byl navržen i Signal Chain Noise Tool [4] provádějící výpočet šumu na úrovni signálového řetězce, a to včetně integrace celkového rušení a výpočtu virtuálního šumu RTI. Ať již řetězec sestavíte přímo od senzoru, nebo začnete příkladem, nástroj Signal Chain Noise Tool určí celkové rušení a střídavé parametry kompletního signálového řetězce, tedy od snímače a dále přes A/D převodník. Simulační modely použité v Signal Chain Noise Tool upotřebí přímo změřené průběhy šumu z dokumentace, takže lze zajistit výsledky s laboratorní přesností. Jedna z hlavních předností nástrojů, jako je tento, spočívá ve zrychlení procesu vývoje. Řešení zprostředkuje okamžitou zpětnou vazbu, pokud jde o vliv obvodových změn na celkové šumové vlastnosti, kdy zároveň umožňuje i rychlejší iterace. Kompletní signálový řetězec lze dále exportovat do LTspice za účelem vlastních simulací.
Obr. 6 Signal Chain Noise Tool v rámci ADI Precision Studio
Závěr
Výpočty vztažené ke vstupu jsou cenným nástrojem, díky kterému pochopíme, jaké vlastnosti měřicího systému lze očekávat. Pomohou s optimalizací návrhů a také při utváření systémových specifikací. Metoda virtuálního šumu RTI, kterou jsme zde předložili, vychází z architektury měřicího systému. Může být užitečnou změnou, díky které vývojáři v porovnání s některými tradičními přístupy získají ještě lepší náhled. Související analýzu poté zajišťují simulační nástroje, jako jsou LTspice a Signal Chain Noise Tool.
Odkazy:
[1] NIST/SEMATECH e-Handbook of Statistical Methods. NIST, duben 2012. Dostupné z https://www.itl.nist.gov/div898/handbook/
[2] GUM: Guide to the Expression of Uncertainty in Measurement. BIPM, 2008. Dostupné z https://www.bipm.org/documents/20126/2071204/JCGM_100_2008_E.pdf/cb0ef43f-baa5-11cf-3f85-4dcd86f77bd6
[3] https://www.analog.com/en/design-center/design-tools-and-calculators/ltspice-simulator.html

