

 Vítejte, dnes je
neděle
12.
duben
2026
Vítejte, dnes je
neděle
12.
duben
2026
Použití napěťových dohledových obvodů znamená pro systémy založené na mikrokontroléru jistotu.
Monitorují zde totiž výpadky napájecího zdroje a díky vynucenému resetu mikrokontroléru předchází u daného návrhu chybám či selhání. Nedostatky napájecího zdroje, jako jsou rušení, krátkodobé změny napětí či přechodové jevy, však mohou zapříčinit i falešné resety, které bývají na obtíž a dokážou negativně ovlivnit chování celého systému. V článku si proto ukážeme, jak takové supervisory pracují s podmínkami, které dokážou spustit chybné a také nepřípustné resetování, takže bude možné zlepšit chování systému i jeho spolehlivost.
Pár slov úvodem
Pro aplikace, které při výpočetních operacích a zpracování dat vyžadují pole FPGA (field programmable gate array), mikroprocesory, digitální signálové procesory či mikrokontroléry, bude podmínkou bezpečná a také spolehlivá činnost. Zmíněné součástky si přitom činí velké nároky na zdroje napájení, protože mají vymezeno jen určité provozní pásmo, pokud jde o toleranci zdroje [1]. K zajištění spolehlivého chodu systému se běžně používají napěťové dohlížecí obvody. Jakmile tedy dojde k nečekanému výkyvu zdroje napájení, podpětí nebo i přepětí, okamžitě zareagují a vynutí si reset. S monitorováním napěťových hladin se však u napájecího zdroje pokaždé pojí určité nepříjemnosti, které na výstupu dokážou spustit nechtěné falešné resety. Jedná se o rušení napájecího zdroje, přechodové jevy v napěťové rovině a také krátkodobé změny či poklesy napětí (glitch), které mohou mít svou příčinu v samotných obvodech zdroje.
V dalším textu se proto zaměříme na různé parametry napěťových supervisorů, které mají co do činění s nechtěným rušením zdroje, přechodovými ději a také změnami napětí. Rovněž si ukážeme, jak dokážou zmíněná kritéria při monitorování zdrojů napájení zvýšit spolehlivost dohlížecích napěťových obvodů, aby tak mohla pro danou aplikaci růst i spolehlivost celého systému.
Rušení zdroje, přechodové jevy a změny napětí v systému
K napájecím zdrojům neoddělitelně patří i jejich stinné stránky. Vždy zde máme nějaké rušivé složky navázané na DC výstupu, které budou mít svou příčinu v samotných součástech obvodů konkrétního zdroje, u dalších zdrojů nebo se pojit s ještě jiným šumem, který je generovaný v rámci systému. Problémy se pak často zhoršují, když je přítomen spínaný DC zdroj napájení SMPS (switch-mode power supply). Ten zde produkuje zvlnění, které logicky souvisí se spínacím kmitočtem. Zároveň u vysokofrekvenčního spínání pozorujeme i přechodové jevy, které se vyskytují při změnách stavu a jejichž příčinou bývá rychlé zapínání a také vypínání výkonových MOSFETů. Na obr. 1 vidíme zapojení, ve kterém dohlížecí obvod MAX705 slouží k monitorování jakékoli „poruchy“ na výstupu spínaného regulátoru, který pro mikrokontrolér zajišťuje napájení.
Obr. 1 Dohledové obvody MAX705 použité při sledování výstupu spínaného regulátoru, který zajišťuje napájení pro mikrokontrolér
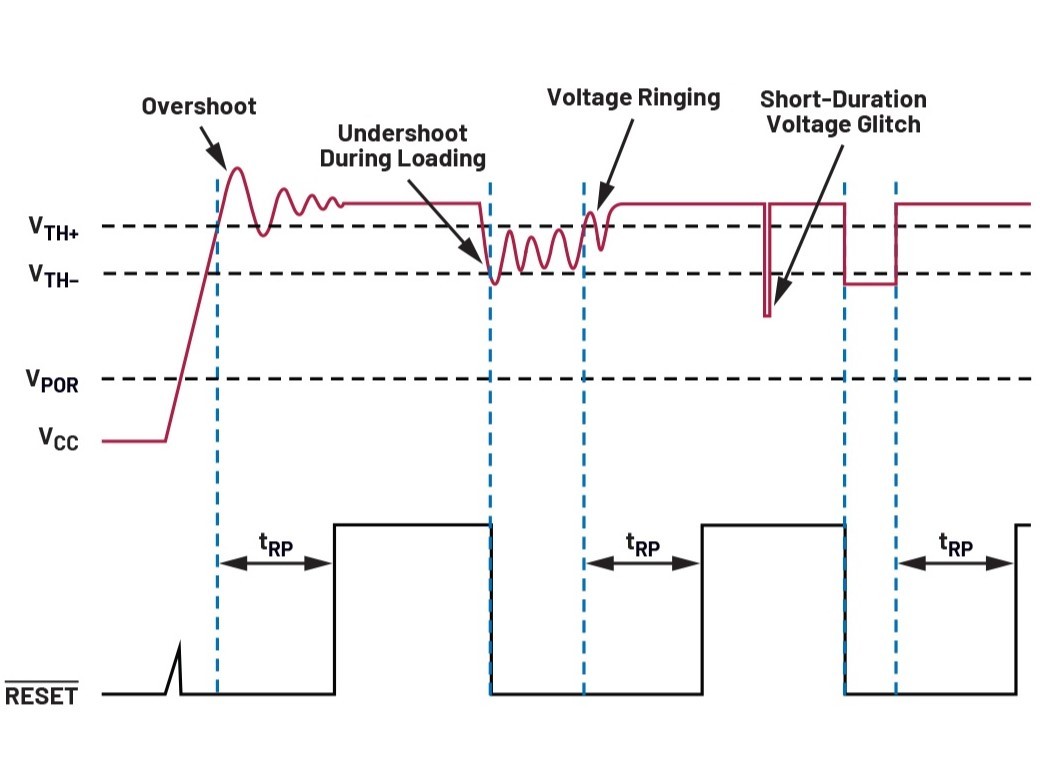
Vedle rušivých projevů při ustálené činnosti zdroje napájení zde ale rovněž existují situace, ve kterých budou napěťové přechodové jevy ještě zřetelnější. Při zapínání se na výstupu obvykle vyskytuje napěťový překmit související s odezvou zpětnovazební smyčky napájecího zdroje, který je po určitou dobu následován zákmity napětí, dokud nebude dosaženo stability. Zmíněné zákmity mohou být ještě horší v případě, že nemáme optimalizovány hodnoty, pokud jde o kompenzaci zpětnovazební smyčky. Napěťové překmity či podkmity lze pozorovat i v průběhu krátkodobého či dynamického zatěžování. V aplikacích někdy zátěž potřebuje více proudu, aby mohla realizovat i náročné operace, což se také neobejde bez podkmitů napětí. S překmity se zase potkáme v případech, kdy zátěž okamžitě či vysokou rychlostí snižujeme. Zároveň se nám budou v systému vyskytovat i krátkodobé změny napájecího napětí způsobené vnějšími činiteli. Různé přechodové jevy a také napěťové změny, se kterými se můžeme za různých okolností potkat u zdroje napájení, nám ilustruje obr. 2.
Obr. 2 Napěťové přechodové jevy a krátkodobé změny, které lze za různých podmínek pozorovat u napájecího napětí
A pak zde máme přechodové děje, které v systému nebudou spojené s napětím zdroje, ale spíše s uživatelským rozhraním, pokud jde třeba o mechanické spínače nebo karty pro určité aplikace. Zapnutí a vypnutí tlačítka, typicky pro manuální reset, představuje u vstupního vývodu zákmity napětí a také rušení. Všechny zmíněné faktory, tedy rušení zdroje, přechodové jevy či krátkodobé změny napětí, mohou za předpokladu své nadměrné velikosti u dohledového obvodu bezděčně dosáhnout prahové úrovně pro podpěťovou či přepěťovou ochranu, a pokud se s nimi v návrhu nepočítá, spouštět i falešné resety. To pak může vést k oscilacím a nestabilnímu chování, což s ohledem na spolehlivost systému není určitě žádoucí.
Jak tedy dohlížecí obvody nakládají s rušením a přechodovými ději, když musí v systému zabránit nepřípustným resetům? Existují zde parametry, které pomáhají maskovat zmiňované jevy související s napájecím zdrojem či monitorovaným napětím. U resetu se bude jednat o časový úsek pro timeout, hysterezi prahových úrovní a také maximální nadsazení prahové úrovně při současném sledování doby trvání. V případě jevů spojených v návrhu s mechanickými kontakty, jako je třeba tlačítkový spínač na vývodu sloužícím k manuálnímu resetu, zde zase budeme mít pro účely maskování přechodových dějů nastavenou periodu pro platné spouštění, včetně doby spojené s odskokem kontaktů. Díky zmíněným parametrům pak napěťové supervisory zůstanou robustní, nenechají se ovlivnit přechodovými jevy či krátkodobými změnami a v systému tak nehrozí nežádoucí reakce.
Reset a jeho perioda pro timeout (tRP)
Při zapínání nebo tehdy, když se napájení poté, co došlo k podpětí, začíná zase zvyšovat a překračuje prahovou úroveň, zde máme pro resetovací signál definovanou dodatečnou prodlevu před tím, než opět přestane být aktivní. Hovoříme pak o době tRP (reset timeout period, [2]). Ilustrace na obr. 3 ukazuje, že poté, co sledované napětí, kterým je v našem případě napájení označené jako VCC, dosáhne po zapnutí či při zotavování z podpěťového stavu prahové úrovně, uplatní se u resetu aktivního v nule před jeho přechodem na logickou jedničku dodatečné zpoždění. Čas navíc umožní monitorovanému napětí, aby se nejprve stabilizovalo, a maskuje překmity či výkyvy před tím, než bude systém znovu aktivován, příp. opustí resetovací režim. Zmíněná perioda tedy omezuje výskyt falešných resetů v systému, aby tím zabránila oscilacím a hrozícímu selhání, což následně pomáhá zlepšit celkovou spolehlivost.
Obr. 3 K době tRP (reset timeout period), která prodlouží reset systému, zatímco se napájecí napětí stabilizuje
Hystereze prahové úrovně (VTH+)
Mít u prahové úrovně hysterezi přináší dvě hlavní výhody. Předně to znamená jistotu, že vámi sledované napětí překonalo prahovou úroveň s dostatečnou rezervou dřív, než přestane být aktivní reset. Za druhé to u napájecího zdroje podobně znamená prostor k jeho ustálení. Resetovací výstup má totiž snahu generovat větší počet změn při zpracování signálu se superponovaným rušením, kdy se napájecí napětí mění a opakovaně přitom zasahuje do prahové oblasti. Jasně to vidíme na obr. 4 [3]. V aplikacích z průmyslového prostředí se mohou rušivé průběhy spolu s výkyvy napětí vyskytnout prakticky kdykoli. Bez přítomné hystereze by se pak resetovací výstup neustále překlápěl, a to až do doby, než se napájecí zdroj stabilizuje. V systému tak rovněž hrozí oscilace, kterým však s hysterezí pro prahové úrovně předejdeme. Jak totiž plyne z modře vyznačené oblasti na obr. 4, reset, který v takovém případě zůstane stále aktivní, zde zabrání nežádoucímu chování a systém lze proto díky supervisoru vhodně chránit před nesprávnými výstupy.
Obr. 4 Chování výstupu RESET s a také bez využití hystereze prahových úrovní (pro zdůraznění vlivu hystereze není vyznačena doba tRP)
Reset a nadsazení prahové úrovně při současném sledování doby
Změny v napětí způsobené vnějšími činiteli se mohou v jakémkoli systému vyskytovat s krátkou nebo i dlouhou dobou trvání. Napěťový pokles může přitom z pohledu magnitudy dosahovat odlišných úrovní. Řešení zde proto spočívá v nadsazení prahové úrovně u resetu při současném sledování délky trvání. Krátkodobá změna napětí, byť by měla větší magnitudu, proto resetovací signál nespustí, zatímco déle trvající stav, třebaže o menší magnitudě, tak již dle obr. 5 učiní.
Obr. 5 Glitch s menší magnitudou, ale zato delší dobou trvání stojí za spuštěním resetovacího signálu. Protikladem se stává kratičká změna s větší magnitudou
Přechodové jevy v napěťové rovině jsou proto u sledovaného napájení přecházeny v závislosti na délce jejich trvání. Ignorování zmíněných jevů váš systém tudíž ochrání před nechtěnými resety, jako jsou ty způsobené krátkodobými změnami napětí. Takové rušivé projevy totiž dokážou reset chybně spouštět, což nakonec povede k nežádoucímu chování celého systému. V dokumentaci k součástce je otázka nadsazení prahové úrovně plus délky trvání často ilustrována s využitím některé z typických charakteristik – viz také průběh na obr. 6. Libovolné hodnoty nad křivkou nám spouští resetovací výstup, zatímco úrovně vymezené tímto průběhem již budou ignorovány, takže nehrozí nepodložené resetování systému.
Obr. 6 „Protlačení“ resetovacího signálu bude závislé na magnitudě spojené s nadsazením prahové úrovně v kontextu délky trvání
Perioda pro spouštění manuálního resetu (tMR) a doba odskoku (tDB)
Reset a jeho perioda pro timeout, hystereze u prahových úrovní nebo i nadsazení prahové úrovně při současném sledování délky trvání společně řeší krátkodobé změny napětí a přechodové jevy spojené s monitorovaným napětím, které zde obvykle zajišťuje napájecí zdroj pro systémový mikrokontrolér. Pokud nám ale takové změny vnáší mechanické kontakty, třeba jako tlačítka, dokážeme případný vliv přechodových dějů či změn zmírnit s využitím periody pro spouštění manuálního resetu a také doby spojené s odskokem.
Tato perioda, označená jako tMR, zde představuje dobu, po kterou je manuální reset před jeho platnou aktivací zapotřebí přidržet. Některé supervisory jsou navržené tak, aby měly zmíněnou periodu dlouhou a poskytly tím systému vhodnou ochranu. Běžně to pozorujeme u spotřební elektroniky, kde k vyvolání resetu potřebujete příslušné tlačítko přidržet po dobu několika vteřin. Taková metoda pak s ohledem na spolehlivost a zabezpečení předchází náhodným a neúmyslným resetům. Díky periodě potřebné ke spuštění manuálního resetu budou veškeré krátkodobé přechodné děje či změny při stisku tlačítka zanedbány – viz také obr. 7a. Systému to pomůže zůstat vůči takovým změnám imunní.
Obr. 7 Perioda pro spouštění manuálního resetu a doba odskoku – znázornění pro supervisor MAX6444 s dlouhou periodou. Dříve, než se může resetovací signál projevit, je zapotřebí dodržet časový úsek tMR (a). Jestliže má být vstupní signál považován za platný, musí se dovršit i doba tDB (b).
Stejný přístup se následně uplatní i v případě doby odskoku. Podobně jako u periody pro spouštění bude i řešení s využitím tDB (debounce time) přecházet bez povšimnutí periodické napěťové jevy s vyšším kmitočtem, provázející u spínače zapnutí nebo i vypínání. Takové „vysokofrekvenční“ děje zde nejsou považovány za platné, a jak vyplývá z obr. 7b, nemohou ani spustit reset. Jakmile však u signálu překročíme dobu tDB, půjde již o čas, díky kterému lze vstupní signál ze spínače nebo tlačítka pokládat za právoplatný.
Závěr
Pokud v zapojení chybí obvody pro dohled nad napětím, hrozí systému v průběhu přechodových dějů či krátkodobých změn pokles napětí (brownout) a možné selhání. Napěťové supervisory však nabízí řešení, protože v takovém případě aktivují reset procesoru. Veškeré parametry, o kterých jsme v článku hovořili, tedy reset a jeho perioda pro timeout, hystereze prahových úrovní, nadsazení prahové úrovně se současným sledováním času, perioda pro spouštění manuálního resetu nebo i doba odskoku, zde při sledování napětí napájecího zdroje zvyšují spolehlivost dohlížecích prvků, které tak budou imunní vůči krátkodobým změnám a přechodovým jevům. Pro navrhovaný systém to ve výsledku znamená stabilitu a spolehlivou činnost.
Odkazy:
[1] The Why, What, How, and When of Using Microprocessor Supervisors. Maxim Integrated, duben 2018. Dostupné z https://www.maximintegrated.com/content/dam/files/design/technical-documents/tutorials/why-what-how-when-of-using-microprocessor-supervisors.pdf
[2] Greg Sutterlin: Supervisors in Multivoltage Systems. Analog Devices, Inc., listopad 2003. Dostupné z https://www.analog.com/en/technical-articles/supervisors-in-multivoltage-systems.html
[3] Pinkesh Sachdev: Adding Hysteresis for Smooth Undervoltage and Overvoltage Lockout. Analog Dialogue, roč. 55, č. 1, březen 2021. Dostupné z https://www.analog.com/en/analog-dialogue/articles/adding-hysteresis-for-smooth-undervoltage-and-overvoltage-lockout.html

