

 Vítejte, dnes je
neděle
11.
květen
2025
Vítejte, dnes je
neděle
11.
květen
2025

Každý z nás již někdy viděl robotický tanec, v němž se my lidé snažíme napodobit trhané a někdy i neohrabané pohyby, které si spojujeme s androidy známými z filmů. Vnímání robotických pohybů pramení z nedokonalých řídicích systémů. Zpětná vazba nebude dost přesná na to, aby zastavila pohyb dříve, než dosáhneme dané pozice nebo koncové polohy. Tak tomu ale nemusí být a ve skutečnosti to tak ani není, vždyť pozorujeme tovární roboty, jak bez námahy „kloužou“ kolem montážních linek nebo skladišť s plynulostí pohybu, kterou my lidé nedokážeme ani zopakovat. A sofistikované robotické nástroje používané chirurgy a vědci by také měly jen malou hodnotu, pokud by se jejich přesnost alespoň nevyrovnala dovednosti jejich obsluhy.
Ať už je to robotická paže v továrně, takto naváděné vozidlo nebo něco, co se robotům předpovídaným ve sci-fi literatuře – s pažemi, nohama a animovanými obličeji alespoň podobá, vždy tedy můžeme říci, že od přesnosti, se kterou řídicí zpětnovazební smyčka pracuje, se odvíjí též ladnost pohybu a kvalita polohování potřebná pro dnešní náročné aplikace. Tato přesnost zase při detekci náklonu, otáčení, zrychlení, nárazu, vibrací nebo přiblížení závisí na síti senzorů. Pokrok v oblasti čidel založených na mikroelektromechanických systémech (tj. na technologii MEMS) nyní nabízí řešení pro všechny tyto otázky.
Sklon je obecně chápan jako měření úhlu vzhledem k referenční rovině nebo ose, jako je tomu např. u zemské osy. V robotice se pak sklon používá k určení polohy robotické paže. Můžeme přitom pracovat buď ve dvouosé rovině, kdy měření rotace poskytuje libovolnou informaci o poloze ve třetím rozměru, která může být vyžadována, nebo vše navrhneme do podoby úplného tříosého měření.
Tam, kde se úhel měří přímo, např. v kloubech robotických paží – viz obr. 1, se pokyn, aby robot pohnul koncem své paže na požadované souřadnice x a y, neobejde bez složitých rovnic inverzní kinematiky sloužících k výpočtu signálů potřebných k pohonu kloubových servomotorů tak, aby zmíněné polohy dosáhly. Alternativní přístup k měření náklonu zde poskytují akcelerometry – čidla v důsledku gravitace stanoví změnu ve směru zrychlení. Funkce bude povědomá každému, kdo má chytrý telefon s čidly MEMS pracujícími s nízkým g, na jejichž výstup systém při otáčení přístroje reaguje změnou orientace displeje. Tato metoda funguje dobře za předpokladu, že je paže robota vystavena pouze statickému zrychlení spojenému s gravitací (tj. v rozmezí ±1 g) a není ovlivněna nárazem do předmětu nebo dosažením své limitní polohy, což by mohlo generovat silnější signál.
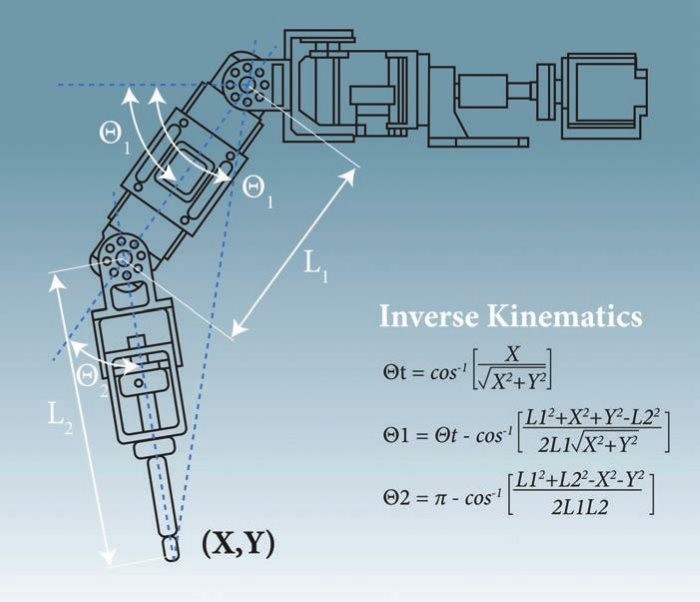
Obr. 1 Výpočet náklonu pro změnu polohy paže robota
Ve dvou rozměrech lze pro jednoduché měření nachýlení použít dvouosý akcelerometr. Tento přístup je však vhodný pouze pro aplikace, kdy máme pracovní rovinu x a y rovnoběžnou s povrchem Země, tzn. kolmou ke gravitační síle, jinak si citlivost měření snižujeme.
Tříosý akcelerometr, jako je např. obvod ADXL345 od společnosti Analog Devices, zmíněná omezení překonává a může tak nabízet úplné řešení trojrozměrného měření náklonu. Ačkoli tato součástka zpracuje rozpětí ±2 g, ±4 g, ±8 g a také ±16 g, pro naše měření náklonu se doporučuje používat rozsah ±2 g, protože takové nastavení zajistí při měření zrychlení spojeného s gravitací též nejvyšší přesnost (±1 g, resp. polovina 13bitového rozsahu).
O rotaci nebo úhlovém pohybu hovoříme v robotice za předpokladu, že se paže nebo jiný nástroj, např. vrták nebo šroubovák, otáčí kolem jediné osy. Měření otáčení mohou dále doplňovat dvouosá měření náklonu a zajišťovat přitom plně trojrozměrné vyhodnocení polohy, a to navzdory omezením tříosých akcelerometrů, s nimiž se potkáváme, dochází-li k rotaci kolem osy z kolmé k Zemi. Za této situace nedochází v rovině x a y k žádné změně, takže v jejich osách naměříme 0 g, zatímco osa z bude i nadále měřit celé 1 g, což znamená, že ve výsledcích z akcelerometrů k žádné změně nedošlo.
MEMS gyroskop je typem čidla speciálně navrženého k vyhodnocení otáčení na základě měření pohybu velmi malé, precizně opracované hmoty pohybující se v rámci rotujícího senzoru díky Coriolisově jevu – viz obr. 2.
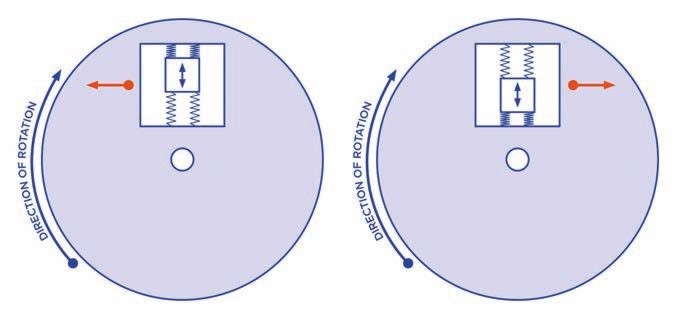
Obr. 2 K principu činnosti gyroskopu MEMS (se svolením Analog Devices)
Gyroskopy budou charakterizovány svým rozsahem a také citlivostí, pro danou aplikaci je tedy důležité správně vybírat. Jejich rozsah tvoří nejvyšší úhlová rychlost ve stupních za vteřinu, kterou ještě dokáží přesně změřit. Citlivostí pak pro danou rychlost rozumíme změnu na výstupu v milivoltech a vyjádříme ji v jednotkách mV/°/s. Obvod FXAS21002C od NXP je gyroskop se 16bitovým rozlišením pracující ve všech třech osách spolu s nastavitelným plným dynamickým rozsahem pokrývajícím oblast od ±250 °/s až do ±2 000 °/s. Kompaktní provedení v pouzdrech typu QFN s 24 vývody a nízkou spotřebou dosahující v aktivním režimu 2,7 mA měří rychlosti až do ±2 000 °/s, přičemž ODR (Output Data Rate) zde dosahuje až 800 Hz. Pro ±2 000 °/s nabídne citlivost 0,0625 °/s, jeho filtr typu dolní propusti umožňuje aplikaci omezit šířku pásma digitálního signálu a podporována jsou též rozhraní I2C a SPI.
16bitový tříosý gyroskop I3G4250D s digitálním výstupem od společnosti STMicroelectronics vykazuje vysokou stabilitu při nulových úrovních a odpovídající citlivost si udržuje též v průběhu času nebo se změnami teploty. Uživatelé mohou volit rozsah, který jejich potřebám vyhoví nejlépe, ±245, ±500 a také ±2 000 °/s. Vedle snímacího prvku obvod rovněž zahrnuje veškerá nezbytná rozhraní senzoru. Naměřenou rychlost dostáváme přes rozhraní SPI, také s možností volby I2C a v rámci teplotního rozsahu od –40 °C až do +85 °C.
Díky vlastní chráněné technologii iSensor bude mít čidlo ADIS16266BCCZ od ADI šířku pásma 360 Hz. Obvod lze přitom využít k měření rotačních pohybů s vysokými rychlostmi v plném rozsahu až do ±14 000 °/s a nechybí zde ani automatické nebo ruční korekce předpětí (rodinu obvodů ADIS16266 vede výrobce již jako „zastaralé“, nicméně s doporučenou náhradou – pozn. red.).
Při úvahách nad využitím akcelerometrů pro měření náklonu si musíme rovněž uvědomit, že zde nepředpokládáme žádné další zrychlení spojené s nárazem, včetně prudkého zpomalení, které prodělá pohybující se paže robota, když se po střetu s jiným předmětem náhle zastaví. Ale i takový náraz lze docela snadno pomocí akcelerometru detekovat, avšak s největší pravděpodobností již v závislosti na svém umístění překročí rozsah obvodu měřícího náklon (±1 g). Pro čidlo umístěné na konci robotické paže bude takový dopad větší než v případě jeho osazení někde na těle.
Další rozdíl ve funkci požadované od akcelerometrů sloužících k detekci nárazu spočívá oproti měření náklonu v nutnosti rychle reagovat. Podobně jako stejný prvek v pevném disku přenosného počítače potřebuje během několika milisekund „zaparkovat“ hlavičku pevného disku, aby zabránil poškození jeho povrchu, bude i zde nutné, aby akcelerometr používaný k detekci nárazu v robotickém systému rychle označil problém a zabránil možnému poškození systému, jeho nejbližšího okolí, či dokonce zranění osob. Z tohoto důvodu bude potřeba pečlivě volit umístění akcelerometru a jeho výstup s ohledem na zajištění prioritních funkcí bedlivě sledovat.
Sledování vibrací bude v jakémkoliv přístroji často otázkou jeho spolehlivosti a také bezpečnosti, protože obecně platí, že vibrace žádoucí nejsou a velmi pravděpodobně ukazují na selhávající součástku nebo též špatnou údržbu. Pro průmyslové roboty může být monitorování vibrací nezbytné k zajištění nepřetržitého bezpečného provozu a v krajním případě též ke spuštění postupů znamenajících bezpečné vypnutí. Detektory vibrací stavějící na strukturách MEMS s integrovanými vf komunikátory mohou pro monitorování a také záznam zmiňovaných událostí v průmyslových podmínkách zajistit velmi efektivní řešení.
Hladký pohyb robotů nebo jejich paží zahrnuje zrychlení i zpomalení, tj. postupné zvyšování a snižování rychlosti – obzvláště při opouštění klidové polohy nebo při návratu zpět. K přesné detekci a řízení takového chování lze použít speciální akcelerometr MEMS , který zajistí, že se robot může přesně přiblížit a zvednout předmět a poté jej opatrně a na tom správném místě bez rizika poškození vrátit zpět. Tuto schopnost demonstrují roboti, kteří dokáží zvedat a přenášet syrová vejce, aniž by je upustili nebo snad rozbili. A v okamžiku, kdy se robot dostává do vlivu vnějších sil, může být schopnost zjišťovat nadměrná zrychlení nebo též zpomalení užitečná také pro jeho bezpečný provoz.
Protože se s technologií MEMS potkáváme v měřicích systémech stále častěji, příležitosti pro spojování čidel jen porostou. Souběžné zachytávání dat z více čidel (akcelerometrů, gyroskopů, magnetometrů, senzorů tlaku apod.) spolu s vhodnými algoritmy číslicové filtrace umožní vykompenzovat nedostatky, které má při samostatném použití každý jednotlivý senzor. Povede to pak ke zlepšení provozních vlastností ve smyslu přesnosti, linearity, rychlosti odezvy a také rozlišení, a ještě to zabrání problémům s ujížděním parametrů. Mezi možné přínosy dále patří úspory v počtu součástek, snížení celkové spotřeby energie a třeba i menší zastavěná plocha na desce. Kombinace tříosého akcelerometru a stejně tak i gyroskopu v robotice znamená, že lze při pohybu systému získat velmi přesné údaje o úhlové rychlosti a stejně tak též informace o náklonu v okamžiku, kdy bude systém v klidu. Sloučením těchto dat ve výsledku dostaneme kompletní přehled o pohybu stroje, včetně otáčení ve všech třech osách apod.

Obr. 3
Na robotické aplikace máme kladeny stále přísnější požadavky a neohrabané, téměř komické akce takových systémů z minulosti již nepřichází v úvahu. Nyní se totiž požaduje plynulý a přesný chod vyvažující sílu, cit i všestrannost – a právě zde se uplatní moderní čidla poskytující nezbytnou zpětnou vazbu pro zdokonalené a bezpečné ovládání. Technologie MEMS s akcelerometry a gyroskopy schopnými měřit náklon, otáčení, vibrace nebo i zrychlení nabízí cestu vpřed. Zvýšíme s nimi nejen výkon, ale zajistíme rovněž přetrvávající provozní spolehlivost a očividně také snížíme související náklady.














