
 Vítejte, dnes je
pondělí
15.
prosinec 2025
Vítejte, dnes je
pondělí
15.
prosinec 2025

Indukční snímače polohy vyvrací 11 mýtů
Umělá inteligence (AI) – tak dlouho jsme na ni čekali a nyní se s ní potkáváme na každém kroku. Od automatizovaných výrobních závodů přes automobily a kamiony bez řidičů až po robotické šoféry, zde všude pozorujeme, jakým způsobem se automatické stroje stávají díky AI efektivnějšími, přináší užitek a pomáhají zlepšit naše životy. Výše zmiňovaná automatizovaná zařízení či vozidla se ale v jádru neobejdou bez precizního měření polohy a také pohybu.
Pozici je možné stanovit mnoha způsoby, nicméně obrovský rozmach zažívají právě indukční snímače polohy. Přesnost, odolnost vůči rušení nebo příznivá cena – to jsou pouze některé z výhod, které taková technologie nabízí. V článku se nyní zaměříme na některé mylné představy spojované s indukčními snímači polohy, které uvedeme na pravou míru, zatímco budeme dále srovnávat i s jinými technologiemi senzorů (Hallův jev, magnetorezistivní prvky).
Mýtus č. 1: indukční snímače pracují při měření polohy s indukčností
Označení může být zavádějící, ale pravdou je, že indukční senzory neměří indukčnost. Místo toho využívají elektromagnetické indukce, resp. magnetického pole spojovaného s kovovým předmětem a také známých vlastností transformátoru se vzduchovým jádrem plus Faradayova zákona, takže lze přesně lokalizovat narušení zmíněného magnetického pole daným předmětem. Pro mnohé z nás, kteří jsme již zapomněli vše, co jsme se ve škole učili v teorii elektromagnetického pole, to může znít složitě. Pokud se tedy máme vyjádřit jednoduše, indukční snímače prostě zkoumají narušení magnetického pole způsobené vodivým předmětem.
Magnetické pole zde navíc není vytvářeno permanentním magnetem, bez kterého se v případě senzorů využívajících Hallova jevu a také magnetorezistivních prvků jinak neobejdeme, a bude místo toho generováno primárním vinutím transformátoru.
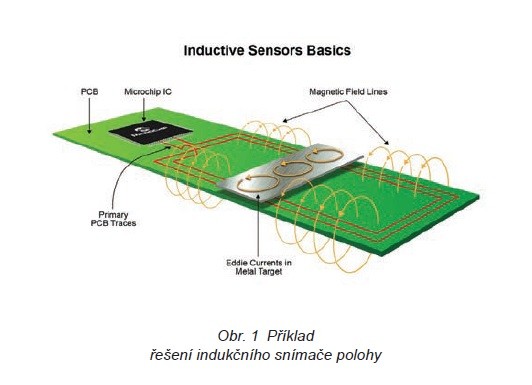
K detekci magnetického pole nám poslouží dvě sekundární cívky a stejně jako u transformátoru využijeme k převodu na napětí Faradayova zákona. Kovový předmět bude v tomto poli vyvolávat vířivé proudy, které působí proti magnetickému poli a jeho intenzita zde klesá k nule. Dvě přijímací cívky pak mohou na základě odlišné polohy zaznamenat rozdílné napětí. Polohu předmětu lze proto u obou cívek přijímače spočítat na základě prostého stanovení poměru napětí.
Mýtus č. 2: indukční snímače polohy nejsou přesné
Tuto mylnou představu není zase tak těžké vyvrátit, protože indukční snímače polohy bývají velmi přesné a vynikají navíc i při vyšších teplotách, kde se již ostatní systémy využívající magnety potýkají s problémy. Základní příčina takové přesnosti spočívá u indukčního snímače polohy v tom, že není závislý na nelineární povaze permanentního magnetu. Místo toho jen zkoumá narušení magnetického pole, které si sám vytváří. Při pokojové teplotě lze proto napříč celým rozsahem měření dosahovat chyby pod úrovní ±0,1 %. Když pak uvážíme změny teploty a také rozdílné vzduchové mezery mezi předmětem a snímačem, nepřekračujeme hladinu ±0,3 %. K dispozici je kromě toho kompletní algoritmus, který teplotní odchylky buď vyloučí, nebo alespoň minimalizuje jejich vliv.
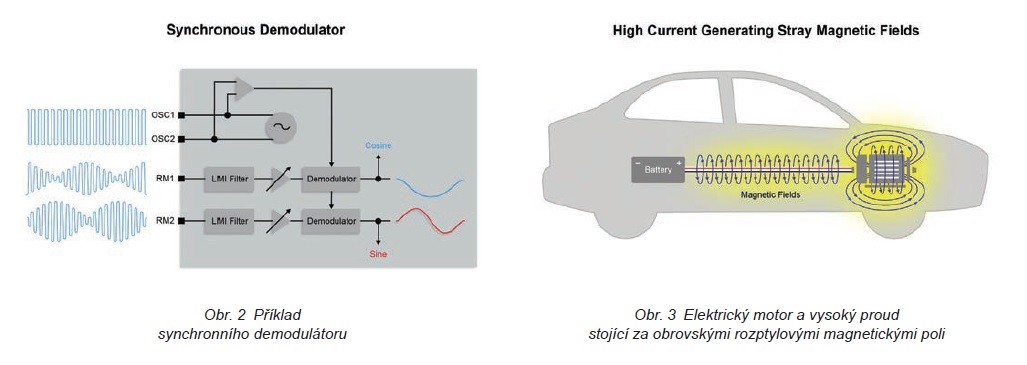
Uvažujme např. indukční snímač polohy, který vyvolává magnetické pole a používá přitom kmitočet mezi 1 a 6 MHz, ovšem za předpokladu LC oscilátoru. Obě tyto veličiny se mohou s teplotou sice měnit, nicméně polohu to nijak neovlivňuje. Důvodem je, že kanály přijímače na sekundární straně využijí synchronní demodulace, která je funkcí primárního oscilátoru. Takový drift pak nemá na amplitudu přijímaného signálu žádný dopad. Spíše než teplota mohou mít na magnetické pole vliv kovové předměty umístěné nedaleko senzoru. Ve výsledku se tak neobejdeme bez určité kalibrace, nicméně ani ta nebude změnami teploty zatížena. Integrované obvody LX3302A od společnosti Microchip Technology při kalibraci kupříkladu využijí osmi částí. K potlačení jakékoli chyby, která se může vyskytnout v souvislosti s kvantizací či výpočtem, rovněž přispívají 13bitové analogově-číslicové převodníky (ADC) a 32bitové procesory, takže napříč měřicím rozsahem obdržíme výstup s rozlišením 12 bitů.
Mýtus č. 3: indukční snímače polohy jsou drahé
Nebývá zase tak běžné, že obdržíte to nejlepší z obou světů – špičkové vlastnosti a také rozumnou cenu, ale indukční senzory to dokážou. A tak zatímco snímače založené na Hallově jevu nebo magnetorezistivní prvky vyžadují permanentní magnet, který musí být pro zajištění přijatelných výsledků vyroben tak, abychom dosáhli příslušné intenzity, včetně tolerancí, indukčním čidlům stačí jen kousek kovu, čímž odpadají náklady spojené s pořízením magnetu. Deska plošného spoje bude sice větší, aby tak mohla u senzoru zajistit nezbytné trasy, ovšem v porovnání s cenou magnetu to obvykle vychází na výrazně menší částku. Pokud navíc máte na desce další místo, může být tato část dokonce „zadarmo“. Indukční snímač polohy se tak z hlediska nákladů a v porovnání s obvody založenými na Hallově jevu či magnetorezistivními prvky stává efektivnějším řešením. Magnetické pole totiž snímá bez potřeby magnetu.
Mýtus č. 4: indukční snímače polohy jsou citlivé na vnější magnetické pole
Současné automatizované stroje vytváří více rozptylových magnetických polí než kdy dříve, což pro senzory založené na Hallově jevu či prvky využívající magnety představuje obtíže. Indukční snímače polohy však za účelem potlačení těchto polí použijí aktivní demodulaci.
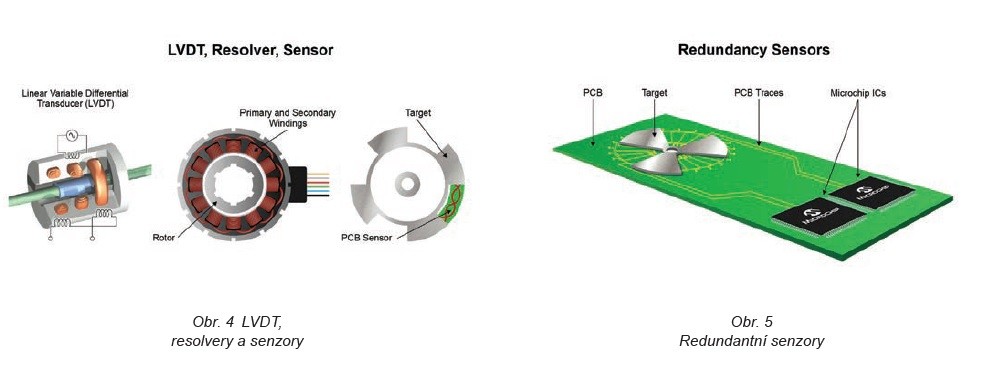
V elektrických vozidlech nové generace může z baterií téct do trakčního motoru několik stovek ampér. Většina aut má kromě toho více než tři BLDC motory (Brushless DC) pro pohyb vozidla, elektronické řízení s posilovačem a také pomoc při brzdění. Všechny takové systémy generují rozptylová magnetická pole. Vzhledem k jejich enormnímu nárůstu vyžadují nové specifikace při intenzivnějším zatížení testy dokládající ještě větší odolnost. V oblasti automobilového průmyslu je nyní elektronika ve vozidlech během zkoušek EMC vystavována DC poli (4 mT), přičemž nejsou tolerovány chybné údaje z jakéhokoli snímače, který hraje z hlediska bezpečnosti klíčovou roli (posilovač řízení, pedál akcelerátoru, pozice rotoru). Krása indukčního zjišťování polohy zde spočívá v tom, že bude vůči zmiňovanému rušení imunní. Aktivně totiž propustí pouze takový kmitočet, který ke snímání potřebuje. Vzhledem k tomu, že indukční snímače polohy nevyužívají žádné magnetické materiály, nezachycují ani žádná DC magnetická pole. Jinými slovy, pro statická magnetická pole dostáváme dle Faradayova zákona nulu. Synchronní demodulátor popsaný výše pak odfiltruje další frekvence nad a pod kmitočtem primárního buzení, prakticky stejně, jako je tomu v případě ladění jediné stanice AM vysílače, zatímco anténa bude přijímat celé AM pásmo. Totožný způsob potlačení však není v případě Hallova jevu či u magnetorezistivních senzorů možný.
Mýtus č. 5: indukční snímání polohy je novou technologií
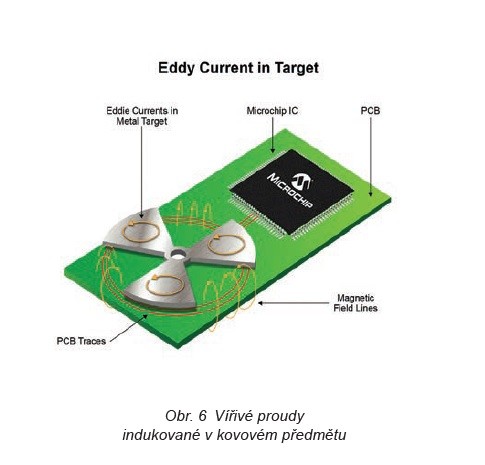
Indukční snímače polohy využívají desku plošného spoje coby senzor spolupracující s kusem kovu (na obrázcích označeno jako „target“). Může se sice jednat o nový způsob, jak vyřešit otázku snímání, nicméně technologie samotná je již dobře zavedená. Blízkým příbuzným se pro indukční snímání polohy očividně stává systém LVDT (Linear Variable Differential Transformer). LVDT používá ke zjištění polohy kovového hřídele v robotických aplikacích primární a také dvě sekundární cívky. Indukční snímače polohy jsou na tom podobně, jen se s vinutím omezují na desku plošného spoje. A obdobné postupy nalezneme rovněž v resolverech – rotační verzi LVDT.
Takže ještě jednou, místo transformátoru „vyhlížejícího“ kovovou strukturu dokážou indukční snímače polohy vykonávat stejnou funkci, zatímco si vystačí s trasami vedenými na desce plošného spoje. Za účelem zjišťování polohy pracují LVDT, resolver a také indukční senzory s poměrem dvou napětí, která jsou indukována v závislosti na narušení magnetického pole vodivým předmětem.
Mýtus č. 6: redundantní indukční snímače zaberou dvojnásobný prostor
Pro zajištění maximální úrovně zabezpečení budou klíčové automobilové systémy či průmyslové aplikace mnohdy vyžadovat redundanci. Duální senzor však na desce plošného spoje díky optimalizaci jeho vrstev a také určitým chytrým postupům, pokud jde o primární vedení, nepotřebuje dvojnásobné místo. Oba senzory se mohou místo toho nacházet ve stejném prostoru. V takovém případě sdílí totožné (volně navázané) magnetické pole, zatímco stále zajišťují galvanické oddělení. Sekundáry pak mohou být zavedeny do dvou integrovaných obvodů, které budou na výstupu zajišťovat redundantní a nezávislou informaci o poloze a zvyšovat přitom spolehlivost dané aplikace.
Mýtus č. 7: indukční snímače polohy se hodí jen pro malá lineární měření
Indukční snímače polohy dokážou měřit lineární pozice s řadou odlišných délek. Nejvyšší přesnosti zde dosáhneme, bude- li délka senzoru přibližně odpovídat žádanému rozsahu měření, takže je možné odstupňovat rozlišení výstupu s ohledem na nejmenší vzdálenost. V praxi se může délka senzoru pohybovat od pěti milimetrů až do 600 mm, nebo ještě dál. Jakékoli omezení v otázce délky má co do činění se schopností LC oscilátoru generovat správný rezonanční signál. Princip činnosti je ve všech případech stejný: dochází ke generování magnetického pole a detekci jeho narušení. Jednoznačnou výhodou se u zmíněné technologie stávají lineární měření. Citlivosti je přitom dosahováno s využitím jediného principu, který se uplatní u celé řady reálných rozsahů měření.
Snímače založené na Hallově jevu mohou přitom vyžadovat hned několik odpovídajících senzorů, které budou během přesunu magnetu z jednoho místa na druhé multiplexovány. Takové dílčí přechody, které mohou být rovněž negativně ovlivňovány teplotou, však znamenají komplikace. Indukční snímač ale zmíněné problémy nezná a lze jej proto využít při zajišťování lineárního měření, které bude konkrétním požadavkům dané aplikace skutečně vyhovovat.
Mýtus č. 8: indukční snímače polohy se hodí jen pro lineární měření
Lineární měření zde sice představuje nespornou výhodu, nicméně indukční snímače polohy mohou při zachování stejných předností v podobě vyšší přesnosti a lepší odolnosti vůči rušení rovněž pracovat s otáčením nebo pohybem vedeným po oblouku. Pedály ve vozidlech, ventily na vodu či pro vzduch nebo poloha rotoru – ve všech těchto případech lze využít technologii indukčního snímání. 360stupňový rotační senzor si můžete představit jako lineární snímač, jehož konce budou zahnuté tak, aby na sebe navazovaly. Z toho tedy vyplývá, že rotační indukční snímače polohy budou zároveň nejpřesnějšími senzory, protože generované magnetické pole může být naprosto stejné bez ohledu na rádius. Technologie proto „obslouží“ jak lineární, tak též obloukové či rotační systémy.
Mýtus č. 9: materiál použitého předmětu musí být magnetický
Indukční snímač polohy detekuje změnu v magnetickém poli, které je ovšem narušeno kovovým předmětem, takže již není potřeba žádného magnetického materiálu. Cokoli, co dokáže vést proud (a umožní přitom tok indukovaných vířivých proudů), způsobí rovněž i žádané narušení. Magnetické materiály, jako je železo, jsou vodivé a lze je rovněž použít. Pokud ale v případě kovu sáhneme po dobrém vodiči typu mědi, hliníku či oceli, dosáhneme při detekci lepších vzdáleností a také menší proudové spotřeby.
Mýtus č. 10: indukční snímače polohy je nutné nastavit prostřednictvím napájecího vstupu
V automobilech je spousta aplikací se senzory řešená formou modulů, které budou s řídicími jednotkami motoru propojené skupinou vodičů. U snímače to obvykle zahrnuje napájení, zem a také výstupní pin. Pokud tedy dokážeme zajistit kalibraci modulu prostřednictvím vývodu napájení, obejdeme se bez jakéhokoli dalšího vedení k desce plošného spoje snímače, což také snižuje náklady a zjednodušuje montáž. Některé systémy však vyžadují mikrokontrolér a to je přesně situace, kdy vestavné aplikace mohou programovat snímač s využitím dalšího mikrokontroléru a ne speciálního testovacího systému. Takovou funkci a schopnosti má rovněž obvod LX3302A od Microchipu, který umožňuje nastavení s využitím vývodů GPIO.
Mýtus č. 11: s návrhem si musíte poradit sami
Není to zase tak dávno, kdy se dobré výsledky neobešly bez solidních znalostí magnetických polí, přístupu ke špičkovým simulačním nástrojům pracujícím s metodou konečných prvků či neustálého opakování ve stylu „pokus–omyl“.
Dnes však výrobci integrovaných obvodů svým zákazníkům poskytují takové služby společně s vývojovými deskami a kity, se kterými se z fáze konceptu přesouváte až k simulacím na základě skutečných tras vedených na desce plošného spoje.
Někteří dodavatelé dokonce zajistí výsledky simulací a propočítají přitom chybu, kterou můžete u snímače očekávat, a to ještě před ověřením přímo na desce. Společnost Microchip Technology takovou podporu nabízí, takže s návrhem na úrovni desky plošného spoje na to určitě nejste sami.
Na příkladu jedenácti mylných představ jsme si ukázali, jak se indukční snímače polohy „popasují“ s čidly využívajícími Hallův jev a také magnetorezistivními prvky, pokud jde o přesnost, odolnost vůči rušení způsobenému rozptylovým magnetickým polem a také cenové náklady.
A co vy, jste již připraveni vyzkoušet zmíněnou technologii při snímání polohy ve svém dalším návrhu využívajícím umělou inteligenci?
